
Автоматическая система посадки самолета
Обновлено: 07.07.2024
В октябре 1937 г. американскими военными властями испытывалась установка для автоматической посадки самолета. На самолете, кроме изобретателей приборов для автоматической посадки, находились представители военного министерства, наблюдавшие за тем, чтобы никто не прикасался к органам управления.
Рис. 1. Схема автоматической посадки самолета: 1— спуск без ветра, 2—при слабом ветре, 3 — при сильном ветре, 4 — здесь происходит прием сигналов последнего радиоотметчика, 5 — самолет автоматически снижается.
Рис. 3. Стрелки показывают антенны. Слева направо: замкнутая антенна радиокомпаса, антенна радиоотметчика (четыре стрелки). Вверху антенна радиоприемника самолета.
Основными частями автоматической установки являются четыре радиостанции и радиоотметчикн на земле и приборы на самолете, которыми управляют радиоволны, посылаемые с земли. Все эти радиостанции и радиоотметчики очень легкого типа, их перевозят на грузовиках, и поэтому автоматическая посадка может происходить на любой подходящей площадке.
Приблизительно в 12 км от аэродрома устанавливается первая передвижная радиостанция, работающая на волнах с частотой колебаний 365 килогерц.
Волны первой станции действуют на радиокомпас на борту самолета, приемное устройство которого может автоматически настраиваться на различные радиоволны. Частоту принимаемых колебаний указывает специальный индикатор, и когда летчик видит, что частота равна 365 килогерц, т. е. что самолет уже находится в районе действия первой радиостанции, он нажимает кнопку автоматической посадки.
Радиоотметчик — это небольшая радиопередающая установка, устанавливаемая возле радиостанций и работающая на той же волне, что и смежная радиостанция. Но радиоотметчик пользуется особыми сигналами, соответствующими азбуке Морзе и автоматически передаваемыми через правильные промежутки времени.
Над третьей станцией, расположенной на расстоянии 1,6 км от аэродрома, процесс настройки повторяется, и радиокомпас готов теперь к приему последней станции — 201 килогерц. Четвертая станция находится у самого аэродрома. Когда самолет пролетает над ней, ее радиоотметчик действует уже не на селектор, а на органы управления, производящие посадку. Во время всех этих операций самолет постепенно снижается и над последней станцией он летит только на высоте 75—85 м. Здесь самолет автоматически увеличивает угол планирования посредством устройства, связывающего альтиметр с дросселем.
Когда колеса самолета коснутся земли, приходит в действие последнее приспособление, управляющее дросселем и тормозами. Таким образом вся посадка производится совершенно без участия летчика.
Дальнейшее усовершенствование этой системы по мнению некоторых военных специалистов США может привести к осуществлению автоматического старта.

Посадка – самый сложный и рискованный этап полета пассажирского лайнера, тут случаются и неудачные касания взлетно-посадочной полосы, и выкатывание за ее пределы. Поэтому именно последние минуты воздушного путешествия (когда вдобавок ко всему самолет слегка потряхивает в вечно турбулентных нижних слоях атмосферы) вызывают максимум отрицательных эмоций у аэрофобов. Однако технологии, позволяющие максимально снизить роль человеческого фактора при приземлении, созданы уже давно, а сейчас, похоже, в этой области наступает новая эра.

Условная схема движения самолета по глиссаде по указаниям КГС. Идея привнести в большую гражданскую авиацию новые навигационные технологии, основанные на распознавании предметов и самообучении, родилась в ходе работ над автономными электрокоптерами.
Летим на маяк
Способность современных лайнеров к выполнению автоматической посадки стала развитием курсо-глиссадной системы (КГС), которую начали разрабатывать в США еще в 1930-x, а уже в начале 1940-х разрешили для использования в гражданской авиации. Основные элементы этой системы – два радиомаяка, курсовой и глиссадный.

А350-1000 – самый большой представитель флагманского семейства широкофюзеляжных лайнеров, производимых концерном Airbus.
В зависимости от оборудования как аэродрома, так и самолета возможен заход на посадку по нескольким категориям и подкатегориям КГС. На категорию 1 (Cat I) экипаж полагается до высоты 60 м. Это высота принятия решения, когда командир воздушного судна определяет, будет выполнена посадка или это сопряжено с риском и надо уходить на второй круг. Категория 2 (Cat II) позволяет снизить высоту принятия решения до 30 м, и наконец для категории III высота принятия решения отсутствует. Фактически самолет при помощи аэродромного оборудования самостоятельно определяет параметры посадки и уже не нуждается в помощи. Самая продвинутая категория – Cat III C. Это практически автономная посадка вслепую – с помощью автопилота. Пилоты остаются за штурвалами или сайдстиками, но приближающейся полосы они могут и не увидеть, если ее, скажем, заволокло плотным туманом.


Приближаясь к взлетно-посадочной полосе, самолет делает последовательные снимки окружающего ландшафта и с помощью новейших алгоритмов обрабатывает эти картинки. Таким образом лайнер самостоятельно ориентируется в пространстве, определяя траекторию захода.
На самом деле осуществлять посадку при низкой видимости или даже в ее отсутствие лайнеру помогают не только маяки КГС, но и другая техника. Например, на самолетах, сертифицированных по категории Cat III обязательно применяются радиовысотомеры – локаторы, точно определяющие расстояние до поверхности. Немалую роль играют маркерные радиомаяки, направляющие строго вверх узконаправленный луч, который дает пролетающему лайнеру информацию о расстоянии до ВВП. Большую помощь навигации в гражданской авиации оказало появление систем глобального позиционирования, в особенности GPS, которая фактически сделала ненужными маркерные маяки (в некоторых странах от них уже отказываются).

Лечу как вижу
Как бы то ни было, возможность посадки вслепую или автоматической посадки, обеспечиваемой постоянным совершенствованием КГС, связана в первую очередь с оборудованием аэропорта, и в мире, в том числе и в развитой его части, есть еще немало воздушных гаваней, оборудованных по первой или второй категориям КГС. Сейчас же отрабатывается другая идея – научить само- лет рулить, взлетать и садиться с минимальной помощью наземного оборудования.
16 января A350-100 совершил автономный взлет, демонстрируя возможности нового типа автономного пилотирования. Испытание проходило на домашнем аэродроме Airbus в пригороде Тулузы Бланьяке. Пилоты лишь поставили РУДы во взлетный режим, а дальше лайнер сделал все сам. Разбежался, аккуратно поднял нос и наконец взлетел. В этот же день было проведено еще семь тестовых взлетов, и все они прошли без каких-либо проблем. 29 июня испытания продолжились. Опираясь на визуальную информацию и алгоритмы распознавания объектов, самолет совершил посадку, уникальную в своем роде. Демонстрации предшествовали 450 ч полетов, в ходе которых собирались сырые видеоданные, которые подлежали обработке для определения оптимальных алгоритмов.

Курсовой маяк – важнейший элемент курсо-глиссадной системы. В западной практике эту систему называют ILS – Instrumental Landing System (система посадки по приборам).
Полностью автоматическую посадку с навигацией и визуальным контролем, которая функционирует без необходимости использования наземных систем, продемонстрировали исследователи из Технического университета Мюнхена (TUM) и их партнеры по проекту.
Система автоматической посадки, которая, помимо сигналов GPS, опирается не на сигналы курсо-глиссадной системы, а на данные с камер, работающих в видимом и инфракрасном диапазонах разработана инженерами из Мюнхенского и Брауншвейгского технических университетов.
Автоматические посадки уже давно стали стандартной процедурой для коммерческих самолетов. В то время как крупные аэропорты имеют инфраструктуру, необходимую для обеспечения безопасной навигации воздушного судна, обычно это не так в небольших аэропортах.
Немецкие инженеры провели испытания системы автоматической посадки, работающей на основании данных GPS и камер, сообщается в пресс-релизе Мюнхенского технического университета.

Алгоритмы компьютерного зрения анализируют положение самолета относительно взлетно-посадочной полосы и корректируют полет. В будущем такая система может помочь наладить автоматическую посадку в небольших аэропортах, не оснащенных маяками инструментальной посадки.
Суть проблемы: сигналы GPS подвержены неточностям измерений, например, из-за атмосферных помех. Приемник GPS в самолете не всегда может обнаружить такие помехи. В результате обычные процедуры захода на посадку по GPS требуют, чтобы пилоты взяли на себя управление на высоте не менее 60 метров и посадили самолет вручную.
Для обеспечения возможности полностью автоматизированной посадки команда TU Braunschweig разработала оптическую систему отсчета: камеру с нормальным видимым диапазоном и инфракрасную камеру, которая также может предоставлять данные в условиях плохой видимости. Исследователи разработали специальное программное обеспечение для обработки изображений, которое позволяет системе определять местоположение самолета относительно взлетно-посадочной полосы на основе данных камеры, которые он получает.
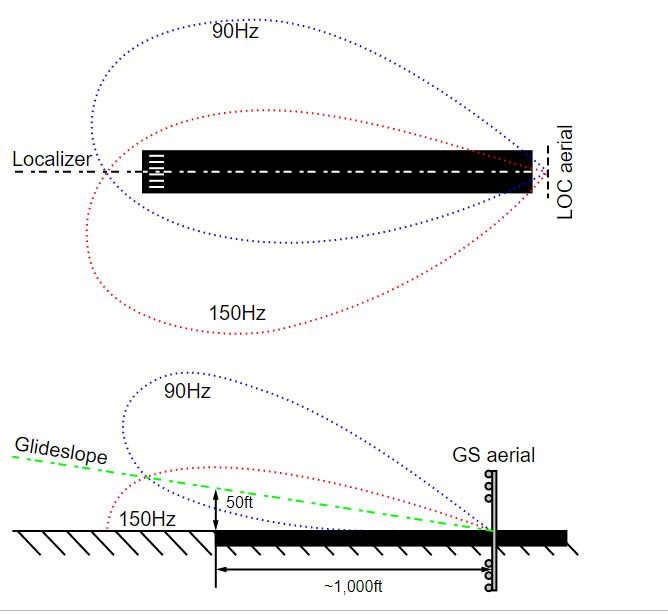
Отметим, что крупные аэропорты оснащены курсо-глиссадной системой, позволяющей самолетам точно заходить на посадку, ориентируясь на радиомаяки. В состав такой системы входят курсовые и глиссадные маяки, которые показывают отклонение самолета от корректного угла захода в горизонтальной и вертикальной плоскостях. Они работают благодаря созданию в одной плоскости двух диаграмм излучения, из-за чего при смещении относительно идеальной траектории приборы самолета показывают увеличение глубины модуляции одной из частот. Кроме того, в состав системы входят три маркерных маяка с вертикально направленным сигналом, пролетая через зону которых пилоты понимают удаление судна от взлетно-посадочной полосы.
Однако этой системой оснащены далеко не все аэропорты, из-за чего на небольших аэродромах пилотам приходится полагаться только на сигналы GPS, а также ориентироваться визуально — что может быть тяжело ночью или в плохую погоду.
Инженеры из Мюнхенского и Брауншвейгского технических университетов разработали систему автоматической посадки, которая, помимо сигналов GPS, опирается не на сигналы курсо-глиссадной системы, а на данные с камер, работающих в видимом и инфракрасном диапазонах. Кроме того, система использует альтиметр и блок инерциальной навигации. Подлетая к взлетно-посадочной полосе, самолет при помощи систем компьютерного зрения начинает анализировать контуры полосы и при необходимости корректирует курс. При этом во время корректировки учитываются показания всех датчиков, а не только камер.
Инженеры установили прототип системы на легкий самолет Diamond DA42 и в конце мая 2019 года провели испытания на аэродроме австрийского города Винер-Нойштадт. В опубликованном ролике можно видеть, как во время посадки пилот не держит руки на ручке управления и не использует другие органы управления. Также доступно другое видео с несколькими автоматическими посадками.

Заход на посадку и уход на второй круг — по статистике самые опасные этапы полёта.
Давайте разбираться, как это работает, и пользуясь моментом, посмотрим как устроена электронная система управления современным самолётом.
Но перед тем, как мы начнем, я вынужден обозначить эдакий дисклеймер: я действующий пилот Airbus семейства 320, который является самолетом 4-го поколения (отличительный признак которого — наличие технологии Fly-by-Wire). Соответственно, многие специфические системы и процедуры, описываемые в посте, будут привязаны к данному типу. На других типах (например Boeing 737 Classic/NG/MAX, которые являются самолетами предыдущего, 3-го поколения без технологии Fly-by-Wire) процедуры и логика построения и работы систем может значительно различаться. И да, я не имею отношения к инженерно-авиационной службе и службе ОрВД (организации воздушного движения), поэтому уж простите возможные огрехи в описании матчасти.
Краткий ликбез по 4 поколению самолетов (Fly-by-Wire)
Наверное, многие из вас наслышаны о технологии Fly-by-Wire (ЭДСУ или электродистанционная система управления по-нашему). Если кратко пробежаться по истории развития систем управления самолетом, то это выглядело примерно так:
- прямая механическая связь между штурвалом и аэродинамическими поверхностями (в общем случае это — элеронами, рулем направления, горизонтальным стабилизатором, триммерами и т.д.);
- появление гидроусилитей/бустеров/пружинных загружателей при наличии прямой механической связи;
- электродистанционное управление (Fly-by-Wire/ЭДСУ)

Здесь много интересной информации по теме Fly-by-Wire
В отличии от классической схемы, где прямая механическая связь (пусть даже через отдельные преобразователи) является правилом, в случае Fly-by-Wire данная связь отсутствует (сейчас опустим тонкости типа управления RUDDER’ом или HORIZONTAL STABILIZER’ом напрямую в режиме MECHANICAL BACKUP, это точно тема для отдельной статьи). Т.е. управляющее воздействие на сайдстик (Airbus) или штурвал (Boeing 777) оцифровывается и передается на FLIGHT COMPUTERS. Кстати, в Airbus их – аж целых 7: 2 ELAC’а (Elevator Aileron Computer), 3 SEC’а (Spoilers Elevator Computer), 2 FAC’а (Flight Augmentation Computer). Далее, исходя из закона управления (FLIGHT CONTROL LAW в терминологии Airbus) и множества других параметров полета, компьютеры выдают сигнал на отработку соответствующих гидроприводов, через которые управляющее воздействие передается аэродинамическим поверхностям.
К чему я это все рассказал: посадка на самолетах с Fly-by-Wire по технике выполнения очень похожа на то, что мы делаем на классических самолетах, но она имеет определенные особенности, о которых необходимо знать. Более подробно мы все это затронем ниже.
Интересные факты
Подготовка к посадке на эшелоне
Итак, мы летим на крейсерском эшелоне, при подлете к аэродрому назначения примерно за 200 с небольшим миль по VHF радиостанции можно услышать информацию ATIS (Automatic Terminal Information Service) аэродрома назначения. Принимаем погоду, далее с помощью специального программного обеспечения от Airbus, размещенного на бортовых iPad’ах (они же EFB — Electronic Flight Bag), проверяем погоду на предмет соответствия нашим landing performance, в частности соответствия расчетной посадочной дистанции располагаемой длине полосы с учетом текущих погодных условий и коэффициента сцепления на полосе и имеющихся отказов оборудования. Airbus 320 семейства имеет ограничения как по попутному ветру для взлета/посадки, так и по боковому. При этом боковая составляющая ветра с учетом порывов не должна превышать значения, внесенные в AFM (Aircraft Flight Manual, оно же РЛЭ – Руководство по летной эксплуатации) при сертификации самолета. Кроме этого, могут быть дополнительные ограничения в аэропорту назначения/запасным, которые находятся в NOTAM’ах (NOTice To AirMan) – эдакая пачка бумаги, которая обязательно выдается перед вылетом экипажу.
Кроме этого, погодные условия на аэродроме должны соответствовать минимуму самолета, экипажа и аэродрома. Если говорить простым языком, то минимум это минимально допустимые значения дальности видимости на полосе и высота облачности над ней (профессионалы, молчать!) Кому интересно – на том же SKYbrary есть очень много статей, рассказывающих про минимумы и их применение.
Сама подготовка включает в себя внесение в FMGS (Flight Management Guidance System, на Airbus их 2) через мини-клавиатуру с дисплеем MCDU (Multipurpose Control and Display Unit) схем прибытия (STAR, STandard ARrival) и самого захода (Approach, обычно это одна из инструментальных схем захода – например заход по ILS, Instrument Landing system), погоду в аэропорту назначения (давление QNH, температура, ветер) и минимума для соответствующего типа захода.

MCDU
При этом схема захода берется автоматически из базы FMGS (которая обновляется техническим составом раз в 24 дня на каждом самолете) и обязательно полностью проверяется на соответствие аэронавигационным сборникам. Наша авиакомпания использует сборники фирмы Jeppesen, которые также размещены в электронном виде на бортовых EFB:

iPad, прибитый к самолету

Или более жесткий вариант. Спасибо lx_photos
После того, как один из пилотов внес данную информацию, второй проводит проверку внесенных в FMGS данных (crosscheck – это одно из основных правил в авиации). Далее пилот, проводивший подготовку к посадке, зачитывает брифинг. Основная задача брифинга – рассказать об особенностях захода на посадку и ее выполнения, схемы руления после посадки, уход на второй круг. Особое внимание – при категорированных заходах по CAT II/CAT III (заходах с очень низкими минимумами, требующих выполнения специальных процедур) и действиям в случае отказа бортового оборудования в процессе захода или имеющихся отказах на борту самолета. NOTAM’ы со всеми ограничениями разбираются здесь же. После разбора всех имеющихся вопросов мы готовы к посадке, осталось дождаться подхода к точке начала снижения, которая также рассчитывается автоматически исходя из внесенных в FMGS данных.
Интересные факты
Снижение и заход на посадку
По своей сути весь процесс полета – это процесс управления энергией. Химическая энергия топлива преобразуется через тягу двигателей и подъемную силу в кинетическую энергию движения самолета и его потенциальную энергию по мере набора высоты, что в сумме дает общую энергию. При снижении – мы наблюдаем обратный процесс, когда вся накопленная энергия расходуется через аэродинамику и снижение высоты таким образом, чтобы получить посадочную скорость и заданную высоту к моменту пролета торца полосы. Исходя из вышесказанного и с учетом отдельных ограничений по скорости/высоте пролета отдельных точек на схеме STAR, ветра, FMGS вычисляет TOD (Top Of Descend, точка начала снижения).
Снижение на самолетах семейства Airbus может выполняться в двух режимах: MANAGED и SELECTED. В первом режиме самолет при помощи автопилота (AP, Autopilot) и автомата тяги (A/THR, Autothrust) сам пытается выдержать профиль снижения с учетом всех ограничений выбранной схемы прибытия, пилоты только контролируют то, что делает автоматика. Это не всегда удается, так как кроме профиля и скоростей, посчитанных FMGS, есть параметры, задаваемые диспетчером. Но в любом случае задание высот и перевод самолета на снижение – это ответственность PF. Для этого в самолете есть FCU (Flight Control Unit) – эдакая панель управления автопилотом самолета:

FCU с красивой подсветкой. Второй автопилот и автомат тяги включен
В режиме SELECTED – пилоты сами управляют автопилотом задавая режимы его работы. Типичные параметры – задача вертикальных и поступательных скоростей, так же довольно часто используется векторение (полет по курсу, заданному диспечером).

Грозовые очаги, как их видят пилоты на ND (Navigation display)
Интересные факты
Выполнение посадки
Еще небольшое лирическое отступление касательно систем захода на посадку: они бывают точные (в первую очередь это ILS, GLS — GBAS Landing System) – это заходы с вертикальным наведением и неточные (NDB – Non Directional Beacon, он же заход по приводам, VOR, RNAV и т.д.) – это заходы без такового наведения. Для каждого из типа захода на посадку есть т.н. GUIDANCE MODE — по сути режим работы FMGS, который обеспечивает заход самолета на посадку с учетом выбранного типа захода. При этом GUIDANCE MODE может обеспечивать точное наведение самолета по курсу и глиссаде (режимы LOG GS или FINAL APP) так и наведение только в одной плоскости (режимы LOC FPA или NAV FPA) или полностью ручное наведение самолета по заданному курсу/углу снижения (режим TRK FPA). Если суммировать сказанное, то точные заходы — более просты с точки зрения поддержки бортовой автоматикой, неточные — требуют дополнительного контроля как профиля, так и курса захода на посадку, что так же требует дополнительных усилий при заходе. Точные заходы позволяют осуществлять посадку при более низких минимумах, чем неточные.
В свою очередь, точные заходы делятся по так называемым категориям: CAT I, CAT II, CAT III A/B/C с соответствующим минимумом. На бывшей территории Советского Союза наличие ILS в аэропортах было раньше непозволительной роскошью, что не позволяло осуществлять заходы при более низких минимумах (чем точнее система захода – тем ниже минимум аэропорта). Но сейчас почти все большие аэропорты севернее Томска имеют ILS. Заход по приводам на старой технике это было еще то искусство полета… Для примера: если взять всю маршрутную нашей авиакомпании в России – только 22 аэропорта оборудованы системой ILS для захода по II категории и только 5 – для захода по IIIA.
Переводим самолет на снижение, зачитываем LANDING чеклист, получаем от диспетчера разрешение на выполнение посадки. При этом диспетчер обязательно сообщит текущий ветер, если он выходит за наши ограничения – то уходим на второй круг. Почти любое срабатывание сигнализации об отказах ниже 1000 футов над полосой в отсутствии визуального контакта с полосой – тоже уход на второй круг.
В 99% в нашей авиакомпании посадка выполняется в ручном режиме. Исключения: категорированные заходы при низких минимумах (CAT II/CAT III), где автоматический заход желателен/необходим. Так же все самолеты семейства Airbus 320 умеют выполнять процедуру Autoland с последующим rollout’ом (автоматическая посадка с последующей остановкой на полосе, с выдерживанием направления пробега используя курсовой маяк системы ILS). Для выполнения данной процедуры еще более жесткие ограничения по ветру, состоянию ВПП, работоспособности бортовых и наземных систем. Как это выглядит вживую:
Буквально три слова про уход на второй круг – в реальной жизни это бывает не так часто, но из-за редкости выполнения и скоротечности самого процесса требует повышенного внимания со стороны экипажа и особенно PM'a. Самое главное здесь – выдержать все ограничения по скоростям, высотам и тангажу при уходе с небольших высот – риск tailstrike высок как никогда. В зависимости от причины ухода на второй круг можно выполнить либо повторный заход, либо уйти на запасной аэродром.
Интересные факты
После посадки и до выключения на стоянке
А вот именно здесь, экипаж отдышавшись после выполнения посадки и освобождения полосы, выполнив необходимые процедуры с последующим AFTER LANDING чеклистом, переходит на частоту руления и узнает дальнейший маршрут движения по аэродрому. Обычно это длинная тирада с номерами рулежек, пересечений иногда с частотами для перехода и командами на ожидание в определенных местах. Главное здесь – все записать, повторить всю эту тираду диспетчеру и найти на схеме аэродрома, где находятся все эти рулежки.
Вот здесь на видео с 6 минуты видно, что из себя представляет схема руления в приложении Jeppesen Mobile Flight Deck:
Так же все рулежки, полосы и и.д. в аэропорту имеют специальную разметку, которая позволяет ориентироваться как в дневное, так и в ночное время. Самое главное здесь – контролировать маршрут руления по всем этим знакам и в случае малейших сомнений – переспрашивать диспетчера. Самолет заднего хода не имеет, поэтому если вы заблокируете рулежку или выедете на рабочую полосу без разрешения диспетчера (Runway Incrusion, что само по себе является серьёзным авиационным инцидентом) то вас просто не поймут.
Подъезжаем к гейту, здесь обычно нас встречает либо система типа SafeDock (моя любимая и наверное, самая распространенная), либо специально обученный человек в оранжевой/зеленой жилетке, который при помощи жезлов заводит нас на стоянку.

Процесс заруливания в исполнении системы SafeDock
Скажу сразу, используемые маршалом сигналы являются стандартными во всем мире и описаны в одном из документов ICAO. Таким образом мы (пилоты) можем понять, что от нас хотят с земли.
Читайте также: