
Игровой автомат посадка на луну
Обновлено: 05.10.2024
Вначале была выставка
Предоставлено Музеем советских игровых автоматов
Предоставлено Музеем советских игровых автоматов
Сомневаюсь, чтобы кому-то платили за патент или авторские права, похоже, все вчистую передрали, как это у нас уже делали и с холодильниками, и с машинами.
Хороший пример про то, как у нас все это копировалось, рассказал мне знакомый, который помогает нашему музею с ремонтом автоматов и параллельно занимается созданием эмуляций игр. От симуляторов их отличает то, что это не подражание, а точная копия, которая воспроизводит алгоритм работы самой электроники, процессов, происходящих внутри платы.
Предоставлено Музеем советских игровых автоматов
И в Москве и во всех крупных городах СССР отечественные игровые автоматы появились в 1974 году. Поначалу их ставили только в парках культуры, в каждом из которых для этого выделяли отдельный зал или строили павильон. Позже их стали также размещать в кинотеатрах, аэропортах и крупных магазинах, на вокзалах и в комнатах отдыха гостиниц, так или иначе нагружая ими разные общественные места.
В пионерские лагеря автоматы поставлялись для бесплатной игры. Лучше всего в этом плане были оснащены самые богатые лагеря, принадлежавшие предприятиям оборонного комплекса. Не каждый день, а скорее по выходным, были часы, когда каждый отряд мог прийти и поиграть. Понятно, что на вожатых и прочих сотрудников администрации пионерлагеря это ограничение не распространялось.
Во всех остальных местах играть можно было только за деньги. С коммерческой точки зрения это был очень выгодный бизнес: народу было охота играть, и люди готовы были за это платить.
Предоставлено Музеем советских игровых автоматов
Фанатской геймерской культуры в СССР не существовало. Поиграть любили все, но культа из этого не делали.
Геймерская культура
Фанатской геймерской культуры в СССР не существовало. Поиграть любили все, но культа из этого не делали: не было ни клубов любителей, ни совместных выходов-тренировок или соревнований.
Предоставлено Музеем советских игровых автоматов
Редкие аппараты






Все материалы добавляются пользователями. При копировании необходимо указывать ссылку на источник.
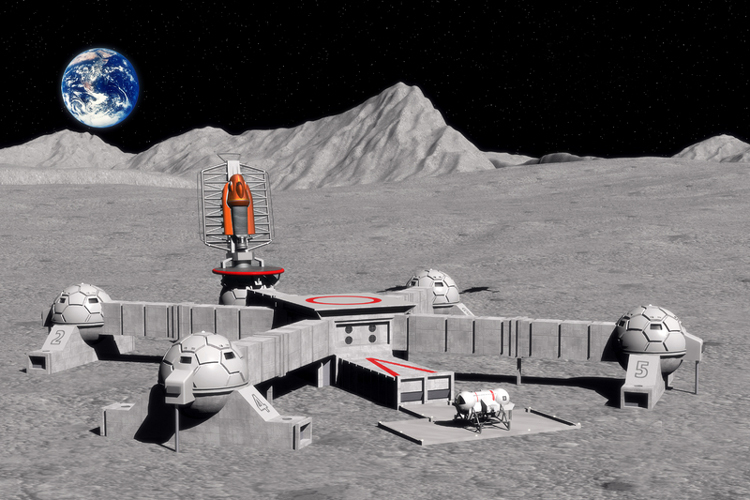
Давненько у меня не было новых постов по Orbiter'у. Поэтому сегодня мы поговорим о штатном аппарате игры под названием Delta-glider, а также, взлетев с Земли, слетаем на лунную базу. Несмотря на фантастичность задания, оно должно быть достаточно любопытным — задача торможения и посадки на Луну не такая простая, как это может показаться. Дело в том, что у Луны нет атмосферы, поэтому тормозить придется двигателями.
Delta-glider

- Масса пустого: 11 тонн обычный, 13 тонн модификация с гиперзвуковыми прямоточными воздушно-реактивными двигателями. Примерно столько весит пустой МиГ-29.
- Масса топлива: 13 тонн.
- Длина: 17,76 м.
- Размах крыла: 17,86 м. Такие длина и размах крыла сравнимы со средними бомбардировщиками ВОВ (Do-17) или штурмовиком A-10.
- Тяга маршевых двигателей: 2*160 кН (чуть больше РД-0124)
- Удельный импульс маршевых двигателей: ~4000 с. Такими параметрами обладают ЯРД, не зря на модели аппарата у двигательного отсека значок радиационной опасности.
Также аппарат имеет подъемные двигатели, которые позволяют совершать вертикальные взлет и посадку, и крылья, позволяющие маневрировать в атмосфере. Сочетание этих свойств делает Дельта-глайдер отличным аппаратом для обучения и полетов для удовольствия.
Подготовка к полёту
Кроме самого Orbiter'а никаких аддонов не нужно.
План полёта
- Старт с Земли и выход на низкую круговую орбиту.
- Совмещение плоскостей орбит.
- Разгон к Луне.
- Выход на орбиту Луны.
- Совмещение плоскости орбиты с местом посадки.
- Торможение и посадка.
Используемые определения

Этап 1. Старт с Земли и выход на низкую круговую орбиту


DG-S — это версия с воздушно-реактивными двигателями, нам они не нужны, но этот сценарий удобен тем, что мы уже стоим на взлетно-посадочной полосе.



Для управления маневрами корабля используется цифровая клавиатура. В начале сценария двигатели ориентации выключены, и кнопки цифровой клавиатуры управляют только аэродинамическими поверхностями — элеронами и рулями направления. Перед взлетом установим триммер руля высоты до упора вверх, нажав и удерживая Delete над блоком курсорных клавиш. Запускаем маршевый двигатель и фиксируем его, нажав Num+ и, не отпуская, Ctrl. При полностью поднятом триммере Дельта-глайдер взлетит самостоятельно.

После взлета убираем шасси (G) и начинаем разворот на азимут 90°. Почему 90°? В этом случае мы будем разгоняться в направлении вращения Земли, и наклонение нашей орбиты будет равно широте места старта (~30° для мыса Канаверал, откуда мы взлетели). После разворота устанавливаем угол тангажа 30°, манипулируя триммером (Insert — вниз, Delete — вверх).

С ростом высоты воздух будет становиться реже, и триммеров станет недостаточно для поддержания постоянного тангажа 30°. Включим двигатели ориентации, нажав кнопку ROT слева-сверху и поддерживая угол тангажа в режиме стабилизации KillRot (Num 5). Но на высоте ~20 км этот режим перестанет нормально справляться. Можно помогать триммерам активным управлением (удобнее, если у вас есть джойстик). Но самый изящный вариант — это поворот маршевых двигателей. Дело в том, что у Дельта-глайдера, как и у многих современных ракет, маршевые двигатели могут поворачиваться на карданном подвесе, создавая управляющий момент. Для того, чтобы изменить угол поворота двигателей, переключаем кокпит в режим 2D (нажимая F8). Управление вертикальным углом двигателей слева-сверху, нажатие на желтые точки изменяет положение обоих двигателей сразу:


Продолжаем разгон до тех пор, пока на орбитальном индикаторе высота апоцентра не составит 200 км. По достижении этого параметра выключаем двигатели нажатием Num *.

Переводим индикатор на лобовом стекле в орбитальный режим (кнопка H) и занимаем положение по вектору орбитальной скорости (носом вперед) — кнопка [ или PROGRD внизу.



Теперь мы можем не только разгоняться по Num+ но и тормозить по Num-. Тормозные двигатели менее мощные, чем маршевые, но ими удобно пользоваться для выполнения точных маневров.
Итак, мы на низкой орбите Земли. Эта орбита устойчивая, поэтому рекомендую сохраниться, нажав Ctrl-S. Сохранения лежат в папке Quicksave сценариев:

Этап 2. Совмещение плоскостей орбит


В районе узла начинаем разгон. Такой большой угол означает, что потребуется несколько маневров.

После первого маневра угол уменьшился в два раза. Повторяем на восходящем узле. Для того, чтобы не было скучно ожидать узла, воспользуйтесь ускорением времени — кнопка T ускоряет время в 10 раз, R — замедляет в 10 раз. Не злоупотребляйте ускорением, при включенном режиме автоматической ориентации корабль может закувыркаться на ускорении больше 1000х.
После второго или третьего маневра относительный угол будет стремиться к 0:

Этап завершен, не забудьте сохраниться.
Этап 3. Разгон к Луне

Совмещаем точку нашего ожидаемого положения с точкой ожидаемого положения Луны.

Параметр DTe — это время до начала маневра. DV — необходимое приращение скорости. Нам стоит начать разгон за некоторое время до достижения точки маневра, чтобы хотя бы частично скомпенсировать боковую составляющую разгона по вектору орбитальной скорости:

Не забудьте заранее занять положение по вектору орбитальной скорости. Разгоняемся:

Очень важно запомнить наше ускорение — 11,8 м/с^2. Это то ускорение, с которым мы будем тормозить у Луны, и оно пригодится нам для расчетов.

Разгон закончен. Для перелета Земля-Луна такая точность вполне достаточна, дополнительная коррекция не требуется. Не забудьте сохраниться.
Этап 4. Выход на орбиту Луны
Готовимся к перелету к Луне. Стабилизируем аппарат режимом KillRot. Он выключится автоматически, и мы сможем спокойно ускорять время.
Чтобы не было скучно, включаем музыку:
В процессе перелета к Луне рекомендую обратить внимание на взаимное положение нас и Луны. Сначала мы её обгоним, но ближе к апоцентру наша скорость станет практически незаметной, и уже Луна догонит нас. Всё по второму закону Кеплера. При подлете к Луне обратите внимание на изменение нашей орбиты — Луна находится сзади нас и тормозит наше движение вперед своей гравитацией.

Необходимо произвести маневр коррекции траектории. Для этого поворачиваем корабль на 90° вправо от направления движения (в интерфейсе есть угломерные инструменты). Почему вправо? Маркер направления нашего движения находится справа от центра Луны, так нам придется меньше маневрировать. Но при желании можно смещаться влево, вверх или вниз. Автопилота для этого режима нет, надо будет удерживать курс 90° вправо вручную. Начинаем маневр:

Когда высота перицентра составит 40-80 км, заканчиваем маневр.

Незадолго до перицентра занимаем положение против вектора орбитальной скорости (кормой вперед) и тормозим, переходя на круговую орбиту:

Отлично, мы на низкой круговой орбите вокруг Луны. Не забудьте сохраниться.
Этап 5. Совмещение плоскости орбиты с местом посадки

Зеленая линия — наша траектория. Нда, так мы на Брайтон Бич никак не попадем. Надо менять наклонение орбиты, чтобы пролететь над базой. Для этого занимаем положение NML+ или NML- по нормали к вектору орбитальной скорости вверх или вниз (для орбиты с почти нулевым наклонением это неважно) и изменяем наклонение орбиты до тех пор, пока зеленая нить траектории не пройдет над базой. Изменять наклонение орбиты лучше не в любой точке, а в районе 90° широты слева или справа от базы. Одна клетка на карте — это 30° широты и долготы.


- Убедиться что мы точно прицелились.
- Снизить орбиту до 10-15 км.

Масштаб карты меняется кнопками ZM+ и ZM-. Режим сопровождения корабля включается кнопкой TRK.
После этого не забудьте сохраниться. Начинается самое интересное — мы идём на посадку.
Этап 6. Торможение и точная посадка



Рекомендую сохраниться километров за 500 от базы.
За 106 км начинаем торможение. После того, как станет заметной вертикальная скорость, начнем её парировать подъемными двигателями (Num 0 — увеличить тягу, Num . — уменьшить тягу). Не допускайте большой вертикальной скорости и большого вертикального ускорения!

Затормозили. Выключаем маршевые двигатели, продолжаем плавно снижаться на подъемных двигателях.

Внизу уже видна база. Целимся маркером направления движения на неё, постепенно снижаем поступательную и вертикальную скорости и выпускаем шасси:

Главное — двигаться плавно, не делать резких движений. Двигатели ориентации можно переключить в режим смещения (Num /) для точного маневрирования.


Осталось совсем чуть-чуть. Обратите внимание на то, что скорость почти погашена.

Можно переключиться на внешний вид по F1, чтобы лучше контролировать процесс посадки.


Рекомендую сохранить сценарий — потом может захотеться слетать, например, к Марсу, а с Луны взлёт и выход на орбиту проще.
Заключение
Не знаю, доживем ли мы до настоящей лунной базы, но такой виртуальный полёт — интересное приключение. И познавательное.
Если хочется что-то изучить глубже, есть переведенный на русский язык мануал. Ну и другие посты серии Orbiter.

Действия
У нас подобная идея, к сожалению, не пошла. Виной тому было много причин: и смерть С. П. Королёва в 1966 году, и недостаток финансирования, и электроника с автоматикой были немного не те – многое не дало нам совершить второй Великий космический рывок. Ракета Н-1 упорно не хотела летать, а советский посадочный лунный модуль был спроектирован вообще одноместным - видимо, из-за ограничения массы. Никто, наверное, не вспомнит, когда зародился анекдот про Леонида Ильича и советских космонавтов, которые полетят не на Луну, а сразу к Солнцу, но после декабря 1968 года всем стало не до шуток, – стало ясно, что Штаты уже не догнать…
Читайте также: