
Ракета с вертикальной посадкой
Обновлено: 19.09.2024
Почему SpaceX Илона Маска вообще сажает ступени? Почему не используются парашюты? Почему иногда посадка производится на сушу, иногда на плавучую баржу, а иногда вообще не производится? Тему возвращаемых ракетных ступеней окружает очень много таких вот “Почему”. И сегодня мы, Alpha Centauri, разберём большинство из них.
Почему SpaceX Илона Маска вообще сажает ступени? Почему не используются парашюты? Почему иногда посадка производится на сушу, иногда на плавучую баржу, а иногда вообще не производится? Тему возвращаемых ракетных ступеней окружает очень много таких вот “Почему”. И сегодня мы, Alpha Centauri, разберём большинство из них.Итак, первый вопрос, который приходит в голову: зачем вообще нужно сажать и повторно использовать ракетные ступени? Вы наверняка уже много раз слышали о том, что это позволяет удешевить запуски и сделать космос более доступным. Такая себе забота о заказчике. Но на самом деле в вопросе есть не только идеологическая и пиар–составляющая. А гораздо более весомая экономическая. Оператор пусковых услуг, имеющий возможность управлять стоимостью запусков, всегда будет в выигрыше. А многоразовость позволяет ещё и более гибко управлять частотой запусков. Так что получается двойной выигрыш.
Стоимость полностью новой ракеты Falcon 9, а точнее её пуска, — около 62 миллионов долларов. Давайте посмотрим на эту цену наглядно:
- Первая ступень. Новая, она стоит около 40 миллионов долларов
- Вторая ступень. Её стоимость — 12 миллионов
- Головной обтекатель, ещё 6 миллионов сверху
- Горючее и окислитель — пара сотен тысяч долларов
- Всё остальное — обслуживание и прибыль компании
Как видим, первая ступень вместе с обтекателем составляют почти три четверти стоимости ракеты. Причём следует понимать, что весомая часть стоимости первой ступени — это девятка двигателей Merlin 1–D. На второй ступени движок всего один.
Зачем вообще нужна вторая ступень и почему одной никак не обойтись — смотрите в нашем видео “проклятье одноступенчатых ракет”:
Сама по себе жидкостная ракетная ступень — это просто большой цилиндр для подачи топлива в двигатели.
Так вот, давайте проведем очень упрощённые математические подсчёты. Допустим, у нас есть целая одна ракета, первую ступень которой мы можем вернуть и повторно использовать 10 раз.
Таким образом для каждого нового запуска нам нужны новая вторая ступень, топливо и головной обтекатель. Ну и обслуживание плюс прибыль. То есть примерно 22 миллиона долларов.
Умножим 22 миллиона на 10 пусков и добавим стоимость первой ступени. Даже от фонаря докинем к ней по миллиону за каждое обслуживание.
Получается 22 x 10 + 40 + 10 = 270 миллионов долларов, суммарная стоимость десяти запусков с одной и той же ступенью. А теперь стоимость тех же десяти стартов, но в случае новой ракеты на каждом:
62 x 10 = 620 миллионов долларов.
Я напомню, что это очень грубые расчёты, они необходимы только для понимания идеи. Из двух компаний, одна из которых вынуждена каждый раз строить новую ракету, а вторая — использует ступени повторно, вторая может позволить себе продавать запуски почти в два раза дешевле. Для сохранения прибыли она может позволить себе цену в 28–30 миллионов долларов, в то время как конкурент может играться в демпинг только пока запуск окупается : а это около 60 миллионов долларов. Запуск одного Протона стоит 65 миллионов долларов, самой тяжёлой версии Ariane 5 — 150 миллионов евро, а старты Delta IV Heavy оцениваются от 160 миллионов долларов.
Поэтому вопрос многоразового использования — это в первую очередь вопрос контроля рынка. Ниже себестоимость — выше возможности управления ценой. Буквально за пять лет SpaceX благодаря гибкости ценообразования практически вывела с рынка коммерческих запусков Роскосмос и серьёзно отъела потенциальных клиентов у Европейских и американских конкурентов, Arianespace и United Launch Alliance.
Но и здесь деньги сами по себе не являются главной целью компании. Как вы знаете, SpaceX сейчас активно занимается выведением на орбиту собственной группировки спутников Starlink. Она позволит покрыть всю планету постоянным качественным соединением. Однако для размещения на низкой околоземной орбите нужны сотни аппаратов, в идеале — даже тысячи! И при возможности вывести всего 60 спутников за раз запланированный минимум в 12 000 аппаратов потребует целых двести запусков. Поэтому максимальное удешевление одного запуска просто необходимо. Обанкротившийся недавно конкурент Starlink, компания OneWeb, которая должна была обеспечить заказами Роскосмос, не даст соврать.
Подведём промежуточный итог. Если вашей целью является запуск пары десятков тысяч спутников и контроль за рынком запусков, вам просто необходим дешёвый носитель и запас в стоимости для демпинга. Именно два этих компонента можно назвать причиной, почему SpaceX вообще взялась за многоразовость.
Хорошо. Как мы знаем, первые ступени Falcon 9 и блоки первой ступени Falcon Heavy совершают реактивную посадку, то есть замедляются до нулевой скорости при помощи реактивной струи из двигателей. Также должна садиться и будущая ракета Starship, испытания её базового прототипа под названием Starhopper мы наблюдали в прямом эфире. Но почему не использовать самый очевидный способ возврата ступени, парашют?
Этот вопрос, кстати, нам продолжают задавать во время прямых трансляций до сих пор. На самом деле здесь в работу вмешиваются три основных фактора.
Зависимость от погодных условий тоже никто не отменял: сильный порывистый ветер будет уносить ступень далеко от предполагаемого места падения, а сегодняшние метеорологические возможности не позволяют точно предсказать куда именно должна будет приземлиться наша ракета. Да, иногда запуски Falcon 9 переносят из–за плохой погоды около баржи, но всё–таки реактивная посадка оставляет больший диапазон подходящих погодных условий.
Ну и грустный опыт Шаттлов, да и самих “Фэлконов”, показывает, что приводнение в солёную воду океана может серьёзно навредить электронике. При этом возникнут трудности с быстрым повторным использованием ступени, что противоречит заявленным планам компании в виде возможности повторных запусков в течение одних суток после возврата.
Есть конечно и другой способ использовать парашют, предложенный компанией Rocket Lab, но о нём мы поговорим позже. На деле же если вы всерьёз собираетесь возвращать первые ступени своей тяжёлой ракеты–носителя, реактивная посадка является очевидным, самым удобным и самым надёжным способом.
Ну окей, допустим, мы в ракетной компании решили, что нам нужны многоразовые первые ступени. И что их посадка будет реактивной. Давайте теперь выясним, что они должны “уметь”, какими свойствами обладать.
Чтобы ракета туда долетела, мы должны каким–то образом ею управлять, рулить. Здесь пригодятся движки ориентации и самые настоящие решётчатые рули, позволяющие стабилизировать и направлять ступень, взаимодействуя с потоками воздуха, особенно на сверхзвуковой скорости.
Ну и не стоит забывать об ещё одном важном моменте: для реактивной посадки ступени нам необходимо топливо, которое позволит зажигать двигатели. Здесь мы плавно переходим к следующему пункту.
Да, возврат ступени невозможен с пустыми баками. Нам всегда нужно оставить хоть немного топлива, чтобы выполнить на орбите и около поверхности определённые манёвры, о которых поговорим позже.
Falcon 9 — ракета тяжёлого класса, она способна выводить на различные орбиты довольно тяжёлые грузы. И возможность возврата ступени сама по себе зависит от двух переменных: параметров орбиты (высота, наклонение) и массы выводимой полезной нагрузки.
От массы зависит то, сколько топлива в секунду мы будем сжигать, ведь чем она больше, тем большая тяга необходима. А от орбиты зависит точка, в которой первая ступень окажется после отделения от второй.
Поэтому когда мы запускаем лёгкий груз на низкую околоземную орбиту с удачным наклонением, у нас остаётся много топлива, а путь к наземной посадочной площадке совсем небольшой, топлива вполне достаточно.
Как видите, даже в минимальном приближении посадка — комплексный и сложный процесс. Но мы ведь не можем не рассмотреть его более детально.
Итак, начинается всё в момент разделения ступеней. Тут нас ждёт небольшое количество англоязычных терминов. Мы конечно же поясним их смысл, но точных русскоязычных аналогов подобрать невозможно, потому что Роскосмос не занимается возвратом ракет. Рассмотрим сначала вариант возвращения к месту старта. Первая ступень активно маневрирует двигателями ориентации, чтобы уйти от пламени, вырывающемся из двигателя второй ступени. При этом первая ступень ещё и разворачивается. Включает 3 двигателя Merlin для выполнения Boostback burn — этап, который нужен для погашения и изменения направления горизонтальной компоненты скорости ступени. С вертикальной компонентой справится гравитация Земли, нет смысла тратить на неё топливо. Поэтому при возврате к месту старта первая ступень подлетает вверх.
Перед входом в плотные слои атмосферы выполняется Reentry burn: три двигателя зажигаются ещё раз. Ведь перед ступенью, двигающейся на сверхзвуковой скорости образуется ударная волна, в которой воздух сжимается. Из–за этого повышается его температура. Если ступень будет двигаться слишком быстро, то воздух ударной волны может её перегреть, несмотря на имеющуюся жидкостную систему охлаждения.
Во–первых, сама по себе точка посадки. Если речь о суше, то всё понятно: необходимая координата просто находится в центре посадочной площадки. Но как быть с посадкой в океане?
А она тоже точно рассчитана и предопределена! Вопреки расхожему мнению, ступень не летит к дрейфующей плавучей барже. Она направляется в заранее заданную координату, идеальную в плане затрат топлива, в то время как баржа со своей стороны автономно и без управления человеком должна удерживать собственный центр в этой координате. На высоте около 10 километров в работу активно вступает радар на первой ступени: он помогает точно определить, где находится баржа, совпадают ли её координаты с координатами точки посадки и хватает ли топлива для самой посадки. Если что–то идёт не так, ступень автоматически направляется в океан и пытается мягко сесть на его поверхность, чтобы не повредить осколками от возможного взрыва платформу.
Если всё в порядке, начинается завершающий этап.
При подлёте к барже выполняется последнее зажигание двигателей, Landing Burn. Причём рассчитано оно так, чтобы торможение было идеальным и ступень снизила скорость до нулевой ровно в момент касания платформы. Это позволяет избежать удара и подпрыгиваний во время волнения на воде. Хотя удаётся не всегда. Выдвигаются посадочные опоры, которые позволяют мягко сесть, на случай немного жёсткой посадки в опорах есть специальные картриджи, которые, сминаясь, гасят энергию удара…
А затем ступень фиксируется прибывшим персоналом при помощи цепей. При этом у SpaceX есть специальный управляемый удалённо робот OctaGrabber: он должен фиксировать ускоритель при помощи гидравлических домкратов.
Так что в отличие от той же малютки Blue Origin New Shepard, Falcon 9 не зависает над посадочной площадкой: она действительно максимально плавно тормозит до нуля метров в секунду.
Кстати, о Blue origin и прочих конкурентах. Ролик–презентации ракеты New Glenn удивил многих любителей космоса именно тем, что там ступень садится прямо на плавучую платформу во время движения. Обеспечить такую посадку гораздо труднее, поэтому, несмотря на утверждения представителей Blue Origin, будто эта посадка будет более стабильной, я склонен думать, что пока это просто неграмотная анимация, а не реальные планы компании Джеффа Безоса. Скорее всего, New Glenn будут садиться по той же схеме, что и Falcon 9 с Falcon Heavy. Первый полёт ракеты этого семейства запланирован на следующий год, а вот о посадках, помимо того, что они в принципе будут, ничего не известно.
Rocket Lab, которую мы сегодня уже упоминали, планируют другой способ: её лёгкая Electron из углепластика вполне может спускаться на парашютах, правда (помните о вреде солёной воды) не в океан. Парашют должен будет подхватываться специальным вертолётом, который затем мягко опустит ступень на специальное судно. Затея опасная и пока труднопредставимая, но уже в ближайших запусках компания Питера Бека займётся испытаниями этой системы. Зрелище будет очень классное, мы обязательно покажем его в прямых эфирах, которые регулярно проводим на канале. К слову, в марте компания уже успела поймать массогабаритный макет ступени в полёте. Выглядит завораживающе:
Подобный рокетлабовскому подход предлагают и американские конкуренты Илона Маска, United Launch Alliance, только их концепт предполагает возвращение одного двигательного отсека, а не всей ступени. Правда об испытаниях и приблизительных сроках пока ничего не слышно.
О важности многоразовых систем заговорили Европейская Арианспейс и российский Роскосмос, но дальше слов дело тоже пока что не заходило.
Так что ближе всего к реализации многоразовых проектов на момент записи этого ролика, весну 2020–го года, находятся Rocket Lab и Blue Origin. И… сама SpaceX, чей Starship потихоньку строится в виде полноразмерных прототипов и активно готовится к прыжкам на несколько километров.
Система посадки этого летательного средства будет аналогична той, что используется в Falcon 9. Только посадка будет всегда на сушу: мощности системы Starship–Superheavy по планам должно быть достаточно для выведения любых адекватных нагрузок на любую орбиту и возврата “домой” на остатках топлива. Сама “первая ступень” системы, ракета SuperHeavy в будущем должна садиться прямо на стартовый стол, но в первых пусках во избежание аварий будет осуществлять посадку на специальных площадках при помощи опор вроде тех, что есть у Falcon 9.
Но обо всём этом нам только предстоит узнать.
Если же говорить о делах насущных, Falcon 9 — единственная многоразовая ракета. Да, пока мы не знаем, сколько раз она действительно может слетать повторно, во сколько именно обходится межполётное обслуживание, но оно точно дешевле, чем производство полностью новой ступени. А значит, SpaceX верно идёт к своей цели.

18 августа 1993 года состоялся первый полет ракеты DC-X, который продлился всего 59 секунд. За это время корабль поднялся на высоту 46 метров, на некоторое время завис в воздухе, переместился по горизонтали на 110 метров и совершил мягкую посадку. По утверждению создателей, впервые в мире прототип ракеты приземлился вертикально.
Предыстория
Американский аэрокосмический инженер Максвелл Хантер вынашивал идею по созданию многоразовых космических кораблей с вертикальным взлетом и посадкой около 30 лет. Работая в Lockheed Missiles and Space Company (LMSC) еще в 1984 году он предложил проект X-Rocket – многоразовой одноступенчатой ракеты-носителя. Концепция была рассмотрена отделом астронавтики и космических миссий корпорации, но до реализации дело не дошло.
После Хантер ушел на пенсию, но свою идею не бросил, переименовал и начал дорабатывать. В 1989 году ему, отставному генералу Грэмму и писателю Пурнеллю удалось организовать встречу с вице-президентом США Дэном Куэйлом. Именно тогда Хантер описал необходимость создания относительно недорогого и простого корабля, который можно многократно использовать.
На тот момент Организация стратегических оборонных инициатив (SDIO) изучала различные концепции вооружения, в том числе и космического базирования. Для запуска и обслуживания военных спутников как раз бы пригодилась подобная ракета-носитель. Поэтому вице-президент идею одобрил, а финансирование проекта взяла на себя SDIO.
Реализацию проекта доверили Хантеру и McDonnell Douglas Corporation – подрядчику министерства обороны США. Будущую ракету назвали DC (Delta Clipper)-X. Буква “X” означала экспериментальный образец.
SDIO обозначила требования, которым должен был удовлетворять корабль: грузоподъемность до 3000 фунтов (1361 кг) полезного груза на высоту порядка 457 км, возврат на взлетную площадку и подготовка новой миссии в течение 3-7 дней.
Характеристики и летные испытания
Учитывая новизну концепции, Хантер с командой решили начать с прототипа в масштабе ⅓ от будущей полнофункциональной модели. DC-X не предназначалась для выхода в космос, а лишь для проверки всех систем и самой идеи вертикальной посадки.
Разработчикам предстояла реализация вертикального взлета, как у классических ракет, после корабль должен входить в атмосферу носом, стабилизироваться и вертикально приземлиться на посадочные опоры.
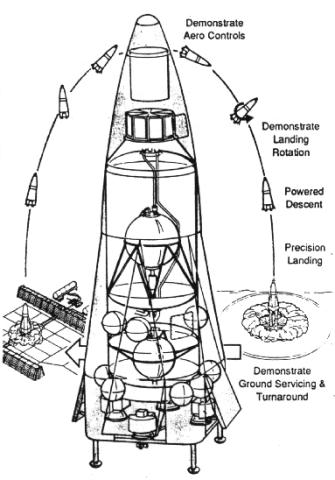
Схема полета DC-X. Источник: NASA
Еще одно приоритетное направление разработки – минимальный персонал для обслуживания. Для DC-X требовалось три человека: два для управления полетом и один для наземной поддержки.
Дизайн ракеты на тот момент был футуристичным – удлиненный конус высотой 12 м с диаметром основания 4,1 м на четырех опорах. Весил пустой аппарат 9100 кг, а с полной топливной загрузкой 18900 кг. Силовую установку представляли четыре двигателя RL10A-5 на жидком водороде и кислороде.
Строительство DC-X началось в 1991 году. В основном ракета собиралась из производимых на тот момент комплектующих. К примеру, использовали систему навигации с кольцевыми лазерными гироскопами от самолета F-15 и т. д. Корпус был изготовлен американской компанией Scaled Composites.
Первый полет состоялся 18 августа 1993 года на полигоне Уайт-Сэндс в Нью-Мексико. После, 11 и 30 сентября провели еще два запуска – ракета достигла 370 метров и успешно приземлилась.. Как раз в это время программу стратегических оборонных инициатив начали сворачивать и прекратили финансировать этот проект.
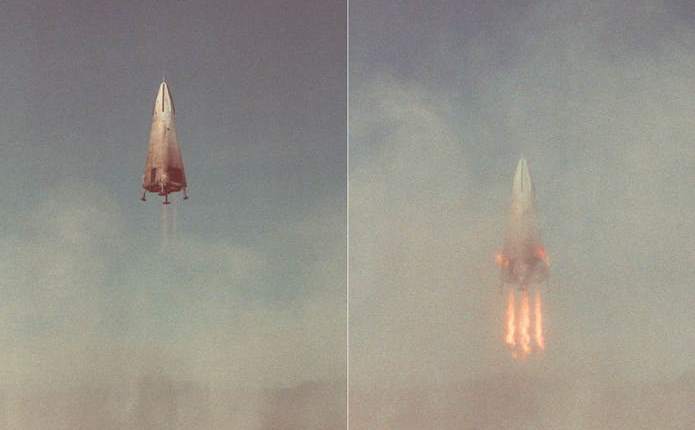
Взлет и посадка DC-X. Источник: NASA
Но флаг подхватили НАСА и Агентство перспективных исследовательских проектов (ARPA). Работы продолжились и уже 20 июня 1994 года состоялся еще один успешный запуск. Следующий полет не был таким удачным – 27 июня произошел небольшой взрыв, но DC-X смогла приземлиться в автоматическом режиме.
После устранения неполадки, в 1995 году произвели еще три запуска. 7 июля состоялся последний – при жесткой посадке треснул корпус ракеты. На тот момент финансирование было урезано, но НАСА решилось на реализацию модернизированного проекта – DC-XA.
Были использованы более легкие материалы для топливных баков и более современная система управления Aerojet. Все это позволило снизить “сухую” массу ракеты на 620 кг.
18 мая 1996 года состоялся первый полет модернизированной версии. Произошло небольшое возгорание, которое не повлекло за собой серьезных последствий. 7 июня этого же года DC-XA опять поднялась в небо на 590 м и мягко приземлилась. Уже через 26 часов состоялся еще один полет – инженеры показали лучшее время для межполетных подготовок. В этот раз ракета достигла своей максимальной высоты полета – 3140 м.
31 июля 1996 года DC-AX совершила свой последний старт. При приземлении одна из опорных стоек не выдвинулась – ракета упала на бок и произошел взрыв. Корабль посчитали неремонтопригодным.
Создание новой DC-X оценили в 50 млн. долларов, что было относительно недорого, но в НАСА посчитали это нецелесообразным. К тому же параллельно в агентстве развивался свой собственный проект Lockheed Martin X-33 / VentureStar – многоразовый космический самолет, который должен был заменить Space Shuttle. Но и его НАСА не реализовало, сославшись на слишком большие затраты.

Визуализация нереализованных проектов X-33 (слева) и VentureStar (справа). Источник: wikipedia
После завершения проекта DC-X, некоторые специалисты рассматривали его готовым решением для посадки и возврата на корабль при миссиях на Луну и Марс – необходимо было бы только обратить вспять последовательность действий. Многие инженеры работавшие над DC-X были наняты компанией Blue Origin и участвовали в разработке корабля New Shepard.
Как показала практика, концепция вертикальной посадки – вещь осуществимая: тот же New Shepard и Grasshopper от SpaceX. И даже если сейчас экономическая целесообразность вызывает вопросы, возможно в будущем такой подход сделает запуски в космос гораздо дешевле. Поживем – увидим.
Сегодня произошло событие, которое можно считать историческим. Впервые первая ступень ракеты-носителя, которая вывела на орбиту полезную нагрузку, совершила мягкую посадку на землю. Конечно, до многоразового использования ракет еще далеко. Возможно, оно не станет экономически оправданным в ближайшее время. Но техническое достижение компании SpaceX сложно не оценить по достоинству. Давайте вспомним основные эксперименты последнего времени по созданию многоразовых систем вертикальной посадки.
1. DC-X (Delta Clipper Experimental) – прототип одноступенчатой многоразовой ракеты, который разрабатывался сначала McDonnell Douglas, а затем НАСА. По результатам восьми испытаний, которые завершились в 1996 году, максимальная высота полета составила около 3 км.
2. Roton – еще один прототип одноступенчатой ракетной системы. Испытания прототипа проходили в 1999 году, однако компании Rotary Rocket не удалось найти финансирование на продолжение разработки. Высота полета не превышала 23 м.
3. В 2006-2009 годах компания Джона Кармака Armadillo Aerospace разрабатывала прототип легкой системы реактивной посадки Pixel, который можно было бы использовать, например, для взлета и посадки на Луне. Позднее их технологии были переданы НАСА.
5. С прошлого десятилетия компания Blue Origin разрабатывает многоразовую суборбитальную космическую систему New Shepard. 23 ноября 2015 года этот аппарат, поднявшийся на высоту 100,5 км, впервые смог успешно осуществить мягкую посадку на землю.
6. Утром 22 декабря 2015 года первая ступень ракеты Falcon 9, которая вывела на орбиту 11 спутников Orbcomm OG2, успешно совершила посадку на специальную площадку на мысе Канаверал.
18 августа 1993 года состоялся первый полет ракеты DC-X, который продлился всего 59 секунд. За это время корабль поднялся на высоту 46 метров, на некоторое время завис в воздухе, переместился по горизонтали на 110 метров и совершил мягкую посадку. По утверждению создателей, впервые в мире прототип ракеты приземлился вертикально.

Предыстория
Американский аэрокосмический инженер Максвелл Хантер вынашивал идею по созданию многоразовых космических кораблей с вертикальным взлетом и посадкой около 30 лет. Работая в Lockheed Missiles and Space Company (LMSC) еще в 1984 году он предложил проект X-Rocket – многоразовой одноступенчатой ракеты-носителя. Концепция была рассмотрена отделом астронавтики и космических миссий корпорации, но до реализации дело не дошло.
После Хантер ушел на пенсию, но свою идею не бросил, переименовал и начал дорабатывать. В 1989 году ему, отставному генералу Грэмму и писателю Пурнеллю удалось организовать встречу с вице-президентом США Дэном Куэйлом. Именно тогда Хантер описал необходимость создания относительно недорогого и простого корабля, который можно многократно использовать.
На тот момент Организация стратегических оборонных инициатив (SDIO) изучала различные концепции вооружения, в том числе и космического базирования. Для запуска и обслуживания военных спутников как раз бы пригодилась подобная ракета-носитель. Поэтому вице-президент идею одобрил, а финансирование проекта взяла на себя SDIO.
Реализацию проекта доверили Хантеру и McDonnell Douglas Corporation – подрядчику министерства обороны США. Будущую ракету назвали DC (Delta Clipper)-X. Буква “X” означала экспериментальный образец.
SDIO обозначила требования, которым должен был удовлетворять корабль: грузоподъемность до 3000 фунтов (1361 кг) полезного груза на высоту порядка 457 км, возврат на взлетную площадку и подготовка новой миссии в течение 3-7 дней.
Характеристики и летные испытания
Учитывая новизну концепции, Хантер с командой решили начать с прототипа в масштабе ⅓ от будущей полнофункциональной модели. DC-X не предназначалась для выхода в космос, а лишь для проверки всех систем и самой идеи вертикальной посадки.
Разработчикам предстояла реализация вертикального взлета, как у классических ракет, после корабль должен входить в атмосферу носом, стабилизироваться и вертикально приземлиться на посадочные опоры.

Схема полета DC-X. Источник: NASA
Еще одно приоритетное направление разработки – минимальный персонал для обслуживания. Для DC-X требовалось три человека: два для управления полетом и один для наземной поддержки.
Дизайн ракеты на тот момент был футуристичным – удлиненный конус высотой 12 м с диаметром основания 4,1 м на четырех опорах. Весил пустой аппарат 9100 кг, а с полной топливной загрузкой 18900 кг. Силовую установку представляли четыре двигателя RL10A-5 на жидком водороде и кислороде.
Строительство DC-X началось в 1991 году. В основном ракета собиралась из производимых на тот момент комплектующих. К примеру, использовали систему навигации с кольцевыми лазерными гироскопами от самолета F-15 и т. д. Корпус был изготовлен американской компанией Scaled Composites.
Первый полет состоялся 18 августа 1993 года на полигоне Уайт-Сэндс в Нью-Мексико. После, 11 и 30 сентября провели еще два запуска – ракета достигла 370 метров и успешно приземлилась.. Как раз в это время программу стратегических оборонных инициатив начали сворачивать и прекратили финансировать этот проект.

Взлет и посадка DC-X. Источник: NASA
Но флаг подхватили НАСА и Агентство перспективных исследовательских проектов (ARPA). Работы продолжились и уже 20 июня 1994 года состоялся еще один успешный запуск. Следующий полет не был таким удачным – 27 июня произошел небольшой взрыв, но DC-X смогла приземлиться в автоматическом режиме.
После устранения неполадки, в 1995 году произвели еще три запуска. 7 июля состоялся последний – при жесткой посадке треснул корпус ракеты. На тот момент финансирование было урезано, но НАСА решилось на реализацию модернизированного проекта – DC-XA.
Были использованы более легкие материалы для топливных баков и более современная система управления Aerojet. Все это позволило снизить “сухую” массу ракеты на 620 кг.
18 мая 1996 года состоялся первый полет модернизированной версии. Произошло небольшое возгорание, которое не повлекло за собой серьезных последствий. 7 июня этого же года DC-XA опять поднялась в небо на 590 м и мягко приземлилась. Уже через 26 часов состоялся еще один полет – инженеры показали лучшее время для межполетных подготовок. В этот раз ракета достигла своей максимальной высоты полета – 3140 м.
31 июля 1996 года DC-AX совершила свой последний старт. При приземлении одна из опорных стоек не выдвинулась – ракета упала на бок и произошел взрыв. Корабль посчитали неремонтопригодным.
Создание новой DC-X оценили в 50 млн. долларов, что было относительно недорого, но в НАСА посчитали это нецелесообразным. К тому же параллельно в агентстве развивался свой собственный проект Lockheed Martin X-33 / VentureStar – многоразовый космический самолет, который должен был заменить Space Shuttle. Но и его НАСА не реализовало, сославшись на слишком большие затраты.

Визуализация нереализованных проектов X-33 (слева) и VentureStar (справа). Источник: wikipedia
После завершения проекта DC-X, некоторые специалисты рассматривали его готовым решением для посадки и возврата на корабль при миссиях на Луну и Марс – необходимо было бы только обратить вспять последовательность действий.
Многие инженеры работавшие над DC-X были наняты компанией Blue Origin и участвовали в разработке корабля New Shepard.
Читайте также: