
Способы регулирования глубины обработки почвы
Обновлено: 05.07.2024
Догружатели служат для увеличения сцепного веса* трактора, т.е. нагрузки (силы), прижимающей ведущие колеса к почве. Их подразделяют на механические и гидравлические.
* Сцепной вес – нагрузка, приходящаяся на ведущие колеса трактора.
Механический догружатель. Перераспределение нагрузок на ведущие колеса трактора зависит от угла наклона верхней (центральной) тяги механизма навески: чем он больше, тем больше сила, догружающая ведущие колеса. Когда тяги механизма навески расположены горизонтально, тяговое сопротивление орудия вызывает в нижних тягах растягивающее, а в центральной тяге сжимающее усилие. При таком навешивании орудия на ведущие колеса трактора действует его сцепной вес, а на опорное колесо и рабочие органы орудия — масса орудия. Если понизить точку крепления центральной тяги 1 (рис. 115) к трактору, то сжимающее усилие Р в центральной тяге действует под углом вниз. При этом появится сила Рв, которая дополнительно прижимает (догружает) ведущие колеса трактора. Равная ей сила примерно настолько же уменьшит массу орудия, действующую на опорное колесо и его рабочие органы. Вот почему заводы-изготовители на корпусе заднего моста закрепляют кронштейн 2 с расположенными по вертикали отверстиями, в которых устанавливают передний конец центральной тяги 1 механизма навески.

Рис. 115. Механический догружатель трактора ЛТЗ-55: а — схема действия; б – устройство; 1 – центральная тяга механизма навески; 2 – кронштейн; 3 – чека крепления центральной тяги; Рс – сила сопротивления орудия; Р – сжимающее усилие в центральной тяге; Рв и Рг вертикальная и горизонтальная составляющие сжимающего усилия
Для тракториста ориентиром правильной настройки догружателя служит опорное колесо, которое должно оставлять за собой едва заметную колею. Недостаток механического догружателя заключается в том, что при его использовании регулировка положения сельскохозяйственного орудия или машины связана с остановкой МТА и перемещением центральной тяги в другое отверстие, на что теряется много времени. Этот недостаток отсутствует у гидравлического догружателя.
Гидравлический догружатель. С помощью него регулируют догрузку ведущих колес во время движения трактора. При использовании гидродогружателя в гидроцилиндре создается небольшое давление, уравновешивающее часть массы навешенного орудия, которая переносится на задние ведущие колеса и одновременно немного разгружает передние колеса. Тем самым увеличивается сцепной вес трактора.
Гидравлический догружатель состоит из гидроувеличителя сцепного веса (ГСВ) и гидроаккумулятора, включенных в схему навесной системы между распределителем и основным гидроцилиндром.

В верхней части корпуса расположен золотник, который смещается вперед (по рисунку – влево) под действием пружины 5.
Внутри золотника размещен предохранительный клапан 10 с пружиной. Ее давление регулируется маховичком 6 одновременно с давлением пружины золотника. Пружина предохранительного клапана подобрана так, чтобы давление срабатывания клапана было всегда больше усилия пружины золотника на 0,8…1,5 МПа.
Рядом с золотником находится обратный клапан 13, который пропускает поток масла из нагнетательной полости ГСВ к гидроаккумулятору и в гидроцилиндр.
Гидроаккумулятор 8 установлен на рукаве полуоси левого колеса. Он состоит из тонкостенного кожуха, внутри которого расположены цилиндр и поршень.
Нагрузка на опорное колесо орудия уменьшится, а масса орудия переносится на ведущие колеса трактора, благодаря чему улучшается их сцепление с грунтом. Подпор в гидроцилиндре (от 0,8 до 2,8 МПа) можно увеличивать вращением маховичка регулятора давления против хода часовой стрелки. Обычно маховичок завертывают до отказа на максимальное давление подпора. Если опорное колесо орудия не копирует рельеф почвы, то необходимо уменьшить давление, отвертывая маховичок по ходу часовой стрелки. При вращении маховичок регулирует натяжение пружины 5 золотника.
Когда давление в гидроаккумуляторе превысит давление пружины 5 золотника, масло переместит его назад вправо, а нагнетательная полость сообщится со сливной. Масло из нагнетательной полости с этого момента (не изображено на рисунке) поступает через сливную полость на слив в масляный бак.
Силовой (позиционный) ретулятор. Регулятор — это дополнительный агрегат навесной гидросистемы.
На универсально-пропашных тракторах кроме высотного применяют силовой и позиционный способы регулирования глубины обработки почвы.
Силовой способ применяют для автоматического поддержания в необходимых пределах глубины обработки почвы через усилие в центральной тяге механизма навески, соответствующее определенному сопротивлению орудия.
Позиционный способ используют для автоматического удерживания орудия в заданном положении (позиции) относительно остова трактора независимо от тягового сопротивления.
Преимущество силового и позиционного способов заключается в том, что отпадает необходимость в опорных колесах орудия и масса навесного орудия передается на задние ведущие колеса трактора, увеличивая его сцепной вес. Устройство для силового и позиционного регулирования состоит из регулятора, датчиков* и механизма управления. Рычаг 6 (рис. 117) механизма управления регулятором расположен в кабине трактора.

Рис. 117. Силовой (позиционный) регулятор с механизмом управления (трактор МТЗ-80): 1 и 2 – штуцера подсоединения шлангов гидроцилиндра; 3 – ограничитель хода рычага; 4 – фиксирующее устройство рычага в выключенном положении; 5 – сектор; 6 – рычаг управления; 7 – валик; 8 – крышка обратного клапана; 9 – корпус регулятора; 10 – ручка крана регулирования скорости коррекции; 11 и 12 – рычаги позиционного и силового регулирования
На секторе 5 управления выделена зона регулирования. Во время работы рычаг 6 устанавливают в определенном месте зоны в зависимости от заданной глубины обработки. Перемещением рычага вперед увеличивают заглубление орудия. При определенной глубине обработки максимальный ход рычага устанавливают ограничителем 3.
Регулятор I (рис. 118) соединен металлическими трубопроводами В, Г, Д, Е и Ж с распределителем, ГСВ и нагнетательной полостью гидронасоса, а шлангами А и Б высокого давления — с гидроцилиндром.
Датчик 22 силового регулирования расположен в кронштейне центральной тяги 20 механизма навески. Усилие сжатия воспринимается пластинчатой пружиной, а усилие растяжения — четырьмя цилиндрическими пружинами.
* Датчик регулятора – устройство, воспринимающее изменение давления или определенной позиции навесного орудия.
Силовое регулированиеприменяют с целью догрузки ведущих колес трактора навесной машиной при одновременной защите трактора и навесной машины от тяговых перегрузок. При силовом регулировании заданное тяговое сопротивление поддерживается постоянным за счет автоматического изменения глубины обработки почвы.
Позиционное регулированиезаключается в установке навесной машины и удержании ее во время работы в заданном положении (позиции) по высоте относительно остова трактора независимо от тягового сопротивления. Его применяют, если требуется точная установка машины относительно остова трактора и при обработке полей с ровным рельефом.
Комбинированное регулированиепредполагает использование двух различных способов для машин, навешиваемых на трактор и снабженных опорными колесами. Способы называют высотно-силовым или высотно-позиционным в зависимости от того, какой регулятор включен в работу. Такая комбинация исключает поперечные перекосы машины, улучшает прямолинейность движения агрегата и создает лучшие условия для копирования рельефа в поперечном направлении (особенно при работе с широкозахватными машинами).
Регулятор I (рис. 84) трактора МТЗ-80 установлен на кронштейне цилиндра и представляет собой гидрораспределитель. Он соединен трубопроводами Л и Б с гидроцилиндром II; Г и Д — с распределителем III; Ж и Е — с гидроувеличителем сцепного веса VII и гидроаккумулятором VI, масляным баком V и насосом IV. В его корпусе расположена подвижная гильза 4, в которой перемещается золотник 8. Пружина 3 отжимает гильзу и золотник 8 в противоположные стороны к гайкам 10 золотника и гильзы, навернутым на винты 14 и 1.
При повороте винтов гайки перемещаются в горизонтальном направлении вместе с золотником или гильзой. Винт 14 золотника рукояткой переключателя 13 соединяют с рычагами 11 или 12, которые через тяги 29 и 30 связаны с датчиками позиционного или силового регулирования.
В регуляторе I предусмотрен кран 15, с помощью которого регулируют скорость коррекции на подъем. Чем больше он закрыт, тем больше масла поступает на слив через распределитель при коррекции и тем меньше ее скорость.
Силовое регулирование глубины обработки почвы трактора МТЗ-80 состоит в следующем. Центральная (верхняя) тяга 31 механизма навески через серьгу 23 и пластинчатую пружину 25 соединена с корпусом заднего моста. Изменение тягового сопротивления машины передается центральной тяге и воспринимается (при сжатии) пластинчатой пружиной или (при растяжении) четырьмя цилиндрическими пружинами 26. Поводком 27, тягой 30 и рычагом 12 деформация передается винту 14 и золотнику 8.
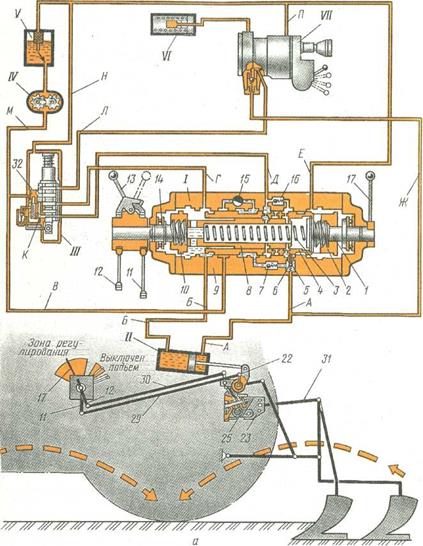 |
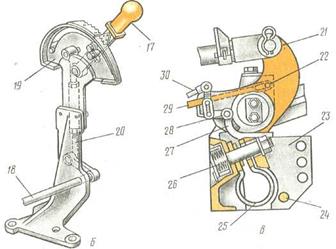
Рис. 84. Схема работы регулятора глубины обработки почвы трактора МТЗ-80:
а — схема действия; б — механизм рукоятки управления регулятором; в — механизм датчиков; 1 — винт гильзы; 2 — гайка гильзы; 3 — распорная пружина; 4 — гильза; 5 — запорный клапан; 6 — толкатель; 7 — обратный клапан; 8 — золотник; 9 — корпус регулятора; 10—гайка золотника; 11 — рычаг позиционного регулирования; 12—рычаг силового регулирования; 13 — переключатель; 14 — винт золотника; 15 — регулирующий кран; 16—обратный клапан; 17—рычаг управления регулятором; 18—валик управления; 19 — сектор; 20 — тяга; 21 — рычаг поворотного вала; 22 — палец; 23 — серьга; 24 — ось серьги; 25 — пластинчатая пружина; 26—цилиндрическая пружина; 27 — поводок; 28 — детали привода; 29 — позиционная тяга; 30 — силовая тяга; 31 — верхняя тяга навески; 32 — перепускной клапан; I—регулятор; II — гидроцилиндр; III—распределитель, IV — насос, V—бак; VI—гидроаккумулятор; VII—ГСВ; А, Б, В, Г, Д, Е, Ж, Л, М, Н и П — трубопроводы; К — отводной канал
Позиционное регулирование трактора МТЗ-80 протекает аналогично, но рукоятку переключателя 13 отклоняют вправо до зацепления с рычагом 11. Винтом 14 золотника будет управлять датчик позиционного регулирования (поворотный рычаг верхнего вала механизма навески), при перемещении которого сигнал на винт 14 будет передаваться через тягу 29 и рычаг 11. Когда переключатель 13 находится в вертикальном положении и удерживается в нем фиксатором, рычаги 11 и 12 не передают усилия на золотник и регулятор не действует.
При позиционном способе регулирования кран 15 ставят на максимальную степень коррекции, повернув вперед (по ходу трактора). Если такое положение крана оставить при силовом регулировании, то увеличится скорость выглубления рабочих органов машины. В процессе работы на почвах с часто меняющейся плотностью необходимо уменьшать скорость выглубления рабочих органов до устранения толчков при коррекции.
Для увеличения чувствительности датчика, когда тяговое сопротивление навесных машин невелико, центральную тягу присоединяют к верхнему отверстию серьги 23, увеличивая длину плеча рычага. Если на тяжелых почвах плуг недостаточно заглубляется, то тягу 31 переставляют в более низкое отверстие на серьге 23.
В случае работы трактора с силовым или позиционным регулированием масса навешенной машины и вертикальные силы, действующие на их рабочие органы, передаются на задний мост трактора, увеличивая его сцепной вес. Это значительно уменьшает буксование ведущих колес.

Опора деревянной одностоечной и способы укрепление угловых опор: Опоры ВЛ - конструкции, предназначенные для поддерживания проводов на необходимой высоте над землей, водой.

Папиллярные узоры пальцев рук - маркер спортивных способностей: дерматоглифические признаки формируются на 3-5 месяце беременности, не изменяются в течение жизни.
Механическое удерживание земляных масс: Механическое удерживание земляных масс на склоне обеспечивают контрфорсными сооружениями различных конструкций.
Раздельно-агрегатная гидросистема современных тракторов приспособлена для работы с навесными машинами, имеющими опорные колеса, и регулирования глубины обработки почвы высотным способом, т. е. изменением положения опорных колес на машине.
Использовать раздельно-агрегатную навесную систему для агрегатирования с навесными машинами, не имеющими опорных колес, нельзя из-за отсутствия возможности применения другого способа регулирования грубины обработки почвы таких машин.
Раздельно-агрегатная гадравлическая навесная система трактора в сочетании с позиционно-силовым регулятором является универсальной, так как с помощью ее можно производить подъем и опускание навесных машин, регулировать догрузку на ведущие колеса трактора за счет массы навесной машины, регулировать глубину обработки почвы с места тракториста и автоматически поддерживать установленную глубину, регулировать и автоматически поддерживать навесную машину в заданном положении относительно трактора, а также управлять выносными цилиндрами, установленными на прицепной машине.
Таким образом, рассматриваемый регулятор обеспечивает два способа регулирования — силовой и позиционный. Силовое регулирование основано на том, что тяговое сопротивление навесной машины меняется с изменением глубины обработки почвы. Изменение тягового сопротивления машины передается на тяги навесного устройства. Для тракторов малой и средней мощности наиболее чувствительным элементом является верхняя тяга, которая испытывает только деформацию сжатия. Поэтому эту тягу присоединяют к специальной пружине, расположенной на тракторе. Изменение тягового сопротивления навесной машины передается через верхнюю тягу пружине, которая сжимается. Эта деформация пружины через рычажную систему передается золотнику распределительного устройства (регулятора), который управляет основным силовым цилиндром; последний поднимая или опуская навесную машину, автоматически поддерживает заданную глубину.
В тракторах большой мощности верхняя тяга испытывает растяжение или сжатие, поэтому она не может служить связывающим звеном между датчиком силового регулирования и тяговым сопротивлением машины. В связи с этим в качестве чувствительного элемента, связанного с датчиком, используют одну из нижних тяг навесного механизма трактора. В остальном силовое автоматическое регулирование глубины обработки почвы происходит также, как и в тракторах средней мощности.
Позиционное регулирование глубины обработки почвы навесной машиной основано на том, что один из подъемных рычагов механизма навески должен находиться в определенном положении по отношению к корпусу трактора. Это достигается тем, что сам подъемный рычаг служит датчиком позиционного регулирования. Изменение глубины обработки почвы вызывает изменение положения механизма навески, а следовательно, и подъемных рычагов относительно корпуса трактора. Поэтому один из подъемных рычагов через рычажную систему связан с золотником распределительного устройства (регулятора) трактора, который управляет работой основного силового цилиндра при отклонении глубины от заданной. Позиционный способ регулирования самостоятельно почти не применяется из-за его несовершенства.
Заданная глубина обработки почвы как при силовом, так и при позиционном регулировании устанавливается одной и той ж е рукояткой управления, связанной с регулятором и автоматически поддерживается за счет его обратной связи с пружиной (датчиком) при силовом регулировании и регулятора с подъемным рычагом при позиционном регулировании.

Рис. Схема работы гидравлической системы тракторов МТЗ-80 (МТЗ-82) с позиционно-силовым регулятором:
1 — рычаг позиционного регулятора; 2 — рычаг силового регулятора; 3 — рукоятка переключения; 4 — гайка золотника; 5 — магистраль, соединяющая корпус регулятора с одним из выводных отверстий золотника распределителя; 6 — корпус позиционно-силового регулятора; 7 — регулировочный кран; 8 — магистраль, идущая от насоса через перепускной клапан 32 и канал распределителя к регулятору; 9 — обратный клапан; 10 — магистраль, соединяющая корпус регулятора с баком; 11 — рукоятка настройки (управления); 12 — магистраль, соединяющая регулятор через догружатель с выводным отверстием золотника распределителя гидросистемы; 13 — гайка гильзы; 14 — магистраль, связывающая полость подъема А гидроцилиндра с регулятором; 15 — обратный клапан; 16 — гильза; 17 — золотник; 18 — магистраль, идущая от насоса к корпусу регулятора; 19 — магистраль, соединяющая регулятор с полостью опускания Б силового цилиндра; 20 — корпус; 21 — силовой цилиндр; 22 — тяга силового регулятора; 23 — тяга позиционного регулятора; 24 — рычаг силового датчика; 25 — рычаг силового цилиндра; 26 — верхняя тяга механизма навески; 27 — тяга позиционного датчика; 28 — серьга для присоединения переднего шарнира верхней тяги; 29 — пластинчатая пружина; 30 — пружина цилиндрическая; 31 — рычаг-датчик позиционного регулятора; 32 — перепускной клапан распределителя.

Рис. Датчик силового регулятора двухстороннего действия: 1 — пружина пластинчатая; 2 — кронштейн поворотного вала; 3 — ограничитель; 4 — пружина цилиндрическая; 5 — болт с направляющей; 6 — шайба; 7 — серьга для присоединения переднего шарнира верхней тяги с поводком; S — втулка; 9 — шплинт; 10 — гайка; 11 — палец для крепления серьги к трактору.
Датчик силового регулирования состоит из пластинчатой пружины 1, четырех цилиндрических пружин 4 и серьги 7 для присоединения верхней тяги с поводком, смонтированных в кронштейне 2, жестко закрепленном к корпусу заднего моста. Для присоединения верхней тяги механизма навески в серьге имеется три отверстия. Фигурный рычаг с серьгой закреплен в кронштейне так, что может поворачиваться вокруг пальца 11 и сжимать пружины 4 при растяжении верхней тяги и сжимать пружину 1 при сжатии верхней тяги.
Поводок серьги соединяется через короткую тягу, рычаг 24 и тягу 22 с рычагом регулятора 2. Пружина 29 воспринимает сжимающие нагрузки в верхней тяге, а пружины 30 — растягивающие. Поэтому конструкция датчика силового регулирования пригодна для соединения его с верхней тягой, имеющей знакопеременные нагрузки. Датчик силового регулирования служит для контроля величины тягового сопротивления навесной машины и передачи регулятору сигнала об отклонениях этого сопротивления от заданной величины. Датчиком позиционного регулирования служит рычаг 31, жестко закрепленный на поворотном валу с рычагом 25 силового цилиндра. Вращательное движение поворотного рычага 31 передается через тягу 23 и рычаг 1 позиционного регулирования, которое вызывает поступательное движение золотника регулятора. Этот датчик служит для контроля заданного положения навесной машины относительно остова трактора и передачи регулятору сигнала об отклонении от этого положения.
Механизм управления регулятором состоит из рукоятки настройки 11, расположенной справа от сидения водителя, зубчатого сектора управления, фиксатора рукоятки на секторе, промежуточного рычага и тяги, соединяющих рукоятку 11 с золотником 17 регулятора, рычагов 1 и 2, тяг 22 и 23, рычагов 31 и 24. Позиционно-силовой регулятор состоит из корпуса 18, подвижной гильзы 17, расположенной в корпусе; золотника 16 расположенного концентрично в гильзе; винта 19 гильзы, на котором установлена ходовая гайка 20; винта 14 золотника, на котором установлена ходовая гайка 15, а на наружном конце — переключатель 7 способа регулирования; распорной пружины 2, находящейся внутри золотника и служащей для поджима золотника к торцу гайки 15, а подшипники 1 через гайки 20 — к внутренним полостям крышки; двух крышек, закрывающих торцы корпуса регулятора; обратного клапана 4, находящегося в корпусе 18; крана 6, регулирующего закрытие перепускного клапана распределителя и управляемого ручкой 5; запорного клапана 3, расположенного также в корпусе, и второго обратного клапана 9, расположенного в крышке 10, закрепленной болтами к корпусу 18. На наружной поверхности золотника имеются кольцевые проточки и выполнено ряд радиальных сверлений. На наружной поверхности гильзы и во внутренней поверхности корпуса выполнено также ряд кольцевых проточек. В гильзе имеются радиальные сверления.
Гильза 17 соединена стопорным кольцом 21 с ходовой гайкой 20, зафиксированной от вращения выступами, заходящими в пазы корпуса. Золотник 16 упирается торцом в ходовую гайку 15, также зафиксированную от вращения выступами, заходящими в пазы корпуса. На винтах гильзы и золотника расположены упорные подшипники 1.
В состав переключателя 7 входят муфта 11, жестко соединенная с винтом 14, и фиксатор 8. При среднем положении фиксатора 8 рычаги 13 и 12 свободно вращаются на муфте 11 при перемещении тяг 22 и 23. Если повернуть ручку фиксатора 8 влево или вправо (по ходу трактора), то муфта 11 блокируется соответственно с рычагом 12 или рачагом 13, передавая вращение соответствующего рычага на винт 14.

Рис. Конструкция позиционно-силового регулятора: 1 — упорный подшипник; 2 — пружина; 3 — запорный клапан; 4 — обратный клапан; 5 — ручка крана; 6 — кран; 7 — переключатель; 8 — фиксатор; 9 — обратный клапан; 10 — крышка; 11 — муфта; 12 — рычаг силового регупирования; 13 — рычаг позиционного регулирования; 14 — винт золотника; 15 — гайка золотника; 16 — золотник; 17 — гильза; 18 — корпус регулятора; 19 — винт гильзы; 20 — гайка гильзы; 21 — стопорное кольцо.
Гильза 16 регулятора может передвигаться в осевом направлении относительно корпуса в определенных пределах. Это сделано для того, чтобы настраивать регулятор на определенный режим работы — регулятор выключен, регулятор настроен на определенную глубину обработки, регулятор установлен на подъем навесной машины в транспортное положение. Положение гильзы (т. е. режим работы) задается рукояткой 11. Положение золотника в гильзе зависит от величины деформации силового или перемещения позиционного датчиков, которые управляют золотником.
Позиционное или силовое регулирование устанавливают с помощью рукоятки переключения 3, снабженной зубчатым сектором, входящим в зацепление с зубчатыми насечками на ступицах рычагов 1 и 2. На рисунке рукоятка 3 установлена в положение силового регулирования, при котором винт золотника жестко связан с рычагом 2 регулятора силового действия, а через тягу 22 и рычаг 24 с датчиком 29 или 30 силового действия. Таким образом, обратная связь между рукояткой 11 настройки и золотником 17 поддерживается через тяги, идущие от позиционного или силового датчиков, и винтовую пару.
Золотник регулятора по отношению к гильзе может занимать нейтральное положение, при котором перепускной клапан 32 распределителя полностью открыт, а рабочая жидкость от насоса направляется через распределитель в бак на слив (подъемная полость силового цилиндра будет заперта золотником 17 и обратными клапанами 15 и 9 — навесная машина находится в заданном положении) и промежуточные положения, при которых будет происходить поступление рабочей жидкости в подпоршневую полость и выход ее из надпоршневой полости, и наоборот.
Насос гидросистемы трактора подает рабочую жидкость по двум разветвляющимся магистралям: одна из них идет через камеру перепускного клапана 32 и по перепускному сверлению распределителя по магистрали 8 в корпус регулятора, а вторая — от насоса по магистрали 18 к корпусу регулятора. Поступление рабочей жидкости в регулятор через распределитель гидросистемы трактора регулируется краном ,7 , т. к. этим определяется положение перепускного клапана распределителя гидросистемы трактора при коррекции глубины обработки в сторону подъема машины.
Глубину обработки навесной машиной как при силовом, так и при позиционном способах регулирования устанавливают одной и той же рукояткой настройки 11, с помощью которой поворачивают винт гильзы, задавая ей определенное положение.

Рис. Положения гильзы и золотника регулятора при переключении рукоятки настройки: а — регулятор включен; б — подъем навесной машины в транспортное положение; в — заглубление навесной машины; г — выглубление навесной машины; 1 — магистраль, соединяющая корпус регулятора с одним из выводных отверстий золотника; 2 — магистраль, идущая от нассса через перепускной клапан 23 канал распределителя к регулятору; 3 — обратиый клапан; 4 — магистраль, соединяющая регулятор через догружатель с вызодным отверстием золотиика распределителя гидросистемы; 5 — магистраль, соединяющая корпус регулятора с баком; 6 — гильза; 7 — золотник; 8 — обратный клапан; 10 — магистраль, идущая от насоса к корпусу регулятора; 11 — магистраль, соединяющая регулятор с полостью опускания силового цилиндра.
При силовом способе регулирования, когда рукоятка 11 находится в зоне регулирования, гильза 16 может занимать одно из двух положений, показанных на рисунках в и г, в зависимости от того происходит заглубление или выглубление навесной машины. Положение золотника в гильзе регулятора зависит от величины деформации пружины или положения датчика регулирования.
При изменении тягового сопротивления машины изменяется деформация пружин 30 или пружины 29, как датчика. Эта деформация вызывает через рычаги, тяги и винт перемещения золотника 17, который перемещается в одну или другую сторону от нейтрального, зафиксированного рукояткой 11, положения гильзы. В одном случае перемещение золотника вызывает соединение полости подъема цилиндра со сливом и произойдет заглубление навесной машины под действием собственной массы. При этом пружина 29 датчика сжимается и поворачивает через рычаг 24, тягу 22 и рычаг 2 винт золотника, входящий в гайку 4. Золотник под давлением гайки 4 будет перемещаться вправо, а навесная машина заглубляться до занятия золотником нейтрального положения, при котором подъемная полость силового цилиндра становится запертой (рис. в). При чрезмерном заглублении навесной машины возрастет сопротивление, а следовательно, и деформация пружины 29, что вызовет перемещение золотника вправо (рис. г), благодаря чему произойдет частичное или полное (в зависимости от регулировки крана 7) закрытие перепускного клапана распределителя и тогда поток рабочей жидкости направляется от насоса по магистрали 10 (рис. г) через оба обратных клапана регулятора в полость подъема гидроцилиндра. В результате этого произойдет выглубление навесной машины. Рабочая жидкость будет поступать в подъемную полость цилиндра, а следовательно, и подъем навесной машины будет продолжаться до тех пор, пока золотник не придет снова в нейтральное положение. Как в первом, так и в другом случаях движение поршня основного гидроцилиндра будет автоматически направлено в сторону удержания машины в заданном положении (на заданной глубине). Так автоматически поддерживается регулятором заданная глубина обработки почвы. Причем с учетом нечувствительности регулятора каждому положению рукоятки 11 в зоне регулирования соответствует определенный диапазон глубины обработки почвы.

Способ включает установку опорных колес почвообрабатывающего орудия на заданную глубину обработки почвы, регулирование положения верхней и нижних тяг переднего навесного устройства трактора относительно поверхности почвы. После заглубления рабочих органов раму почвообрабатывающего орудия и нижние тяги располагают параллельно поверхности почвы. Верхнюю тягу устанавливают параллельно направлению действия силы сопротивления почвы на рабочие органы почвообрабатывающего орудия. Параллельное положение верхней тяги контролируют по наличию нулевого значения математического ожидания вертикального ускорения, измеряемого в центре тяжести почвообрабатывающего орудия. Верхнюю тягу концом, соединенным с почвообрабатывающим орудием, на культивации направляют вверх, а на дисковании - вниз относительно поверхности почвы. Устройство содержит переднее навесное устройство трактора с верхней и нижними тягами, раму почвообрабатывающего орудия со стойкой. Верхняя тяга выполнена в виде гидроцилиндра и двуплечего рычага. Гидроцилиндр штоком шарнирно соединен со стойкой рамы почвообрабатывающего орудия, а корпусом шарнирно соединен с одним концом двуплечего рычага, который шарнирно установлен на оси верхней тяги навесного устройства, и другим концом посредством гидроцилиндра шарнирно соединен с рамой трактора. На раме почвообрабатывающего орудия в центре тяжести установлен датчик вертикального ускорения. На нижней тяге установлен датчик углового перемещения стойки рамы. Датчики ускорения и углового перемещения подключены к входам блока управления. Гидрораспределитель навесного устройства подключен к выходам блока управления. Повышается качество обработки почвы и снижаются затраты энергии на ее обработку. 2 н.п. ф-лы, 4 ил.
Изобретение относится к сельскохозяйственному машиностроению, в частности к почвообрабатывающим агрегатам с орудиями и машинами, навешенными на переднее навесное устройство трактора.
Известен способ регулирования глубины обработки почвы (SU 1486074, А01В 63/108, 15.06.89), включающий установку опорных колес почвообрабатывающего орудия на заданную глубину обработки почвы, регулирование положения верхней тяги переднего навесного устройства трактора относительно поверхности почвы.
Недостатком известного способа является то, что при регулировании положения верхней тяги вместе с изменением высоты стойки нарушается горизонтальное положение рамы почвообрабатывающего орудия.
Известен способ регулирования глубины обработки почвы (SU 1531872, А01В 59/048, 30.12.89), включающий установку опорных колес почвообрабатывающего орудия на заданную глубину обработки почвы, регулирование положения верхней и нижних тяг переднего навесного устройства трактора относительно поверхности почвы.
Однако в процессе регулирования расположения верхней и нижних тяг переднего навесного устройства по известному способу возможна установка рабочих органов, расположенных в несколько рядов, на разную глубину обработки почвы.
Известно устройство для регулирования глубины обработки почвы (Тракторы ЛТЗ-155 и ЛТЗ-155У. Техническое описание, инструкция по эксплуатации и техническому обслуживанию. - Липецк, 1995. - С.122-124), содержащее переднее навесное устройство трактора с верхней и нижними тягами, раму почвообрабатывающего орудия со стойкой.
Недостатки известного устройства заключаются в том, что регулирование положения верхней и нижних тяг переднего навесного устройства производят только во время остановки агрегата, пределы регулирования положения верхней тяги ограничены количеством отверстий на стойке почвообрабатывающего орудия.
Известно устройство для регулирования глубины обработки почвы (RU 1079193, А01В 59/04, 15.03.84), содержащее переднее навесное устройство трактора с верхней и нижними тягами, раму почвообрабатывающего орудия со стойкой.
Недостатком известного устройства является то, что регулирование положения верхней и нижних тяг производят согласно тяговому усилию трактора, не учитывая направление действия силы сопротивления почвы на рабочие органы, и тем самым увеличивают неравномерность глубины обработки почвы.
Для устранения отмеченных недостатков предлагается после заглубления рабочих органов раму почвообрабатывающего орудия и нижние тяги располагать параллельно поверхности почвы, а верхнюю тягу устанавливать параллельно направлению действия силы сопротивления почвы на рабочие органы почвообрабатывающего орудия, параллельное положение верхней тяги контролировать по наличию нулевого значения математического ожидания вертикального ускорения, измеряемого в центре тяжести почвообрабатывающего орудия, причем верхнею тягу концом, соединенным с почвообрабатывающим орудием, на культивации направлять вверх, а на дисковании - вниз относительно поверхности почвы.
Для осуществления способа регулирования глубины обработки почвы предлагается устройство, у которого верхняя тяга выполнена в виде гидроцилиндра и двуплечего рычага, причем гидроцилиндр штоком шарнирно соединен со стойкой рамы почвообрабатывающего орудия, а корпусом шарнирно соединен с одним концом двуплечего рычага, который шарнирно установлен на оси верхней тяги навесного устройства, и другим концом посредством гидроцилиндра шарнирно соединен с рамой трактора, на раме почвообрабатывающего орудия в центре тяжести установлен датчик вертикального ускорения, а на нижней тяге установлен датчик углового перемещения стойки рамы, датчики ускорения и углового перемещения подключенные к входам блока управления, а гидрораспределитиль навесного устройства подключен к выходам блока управления.
На фиг.1 представлена схема последовательности операций при регулировании глубины обработки почвы.
На фиг.2 показано устройство для осуществления способа регулирования глубины обработки почвы.
На фиг.3 показано положение верхней тяги переднего навесного устройства трактора в агрегате с культиватором.
На фиг.4 показано положение верхней тяги переднего навесного устройства трактора в агрегате с дисковым орудием.
Способ регулирования глубины обработки почвы, включающий установку опорных колес почвообрабатывающего орудия на заданную глубину обработки почвы, регулирование положения верхней и нижних тяг переднего навесного устройства трактора относительно поверхности почвы, осуществляется следующим образом (фиг.1).
Перед заездом агрегата в поле опорные колеса почвообрабатывающего орудия устанавливают на заданную глубину обработки почвы. Заглубляют рабочие органы в почву, раму почвообрабатывающего орудия и нижние тяги переднего навесного устройства трактора располагают параллельно поверхности почвы.
Верхнюю тягу устанавливают параллельно предполагаемому направлению действия силы сопротивления почвы на рабочие органы почвообрабатывающего орудия. Если трактор агрегатируют с культиватором, оснащенным стрельчатыми лапами, то верхнюю тягу концом, соединенным с почвообрабатывающем орудием, направляют вверх относительно поверхности почвы. Если трактор агрегатируют с дисковым орудием, то верхнюю тягу направляют вниз относительно поверхности почвы.
После начала движения агрегата измеряют вертикальное ускорение рамы почвообрабатывающего орудия в центре тяжести и определяют математическое ожидание массива значений вертикального ускорения. Если математическое ожидание равно нулю, то верхняя тяга установлена параллельно направлению действия силы сопротивления почвы на рабочие органы. В противном случае корректируют и проверяют положение верхней тяги во время движения агрегата.
Устройство (фиг.2) содержит раму 1 почвообрабатывающего орудия, на которой установлены опорные колеса 2, рабочие органы 3 и стойка 4. Рама 1 шарнирно соединена с нижними тягами 5 переднего навесного устройства трактора 6. Верхняя тяга переднего навесного устройства выполнена в виде гидроцилиндра 7, который штоком шарнирно соединен со стойкой 4, а корпусом - с одним концом двуплечего рычага 8. Двуплечий рычаг 8 шарнирно установлен на верхней оси 9 переднего навесного устройства. Другой конец двуплечего рычага 8 шарнирно соединен со штоком гидроцилиндра 10, который шарнирно установлен на раме трактора 6. Гидроцилиндры 7 и 10 подключены к золотникам 11 и 12 гидрораспределителя трактора 6. На раме 1 в центре тяжести почвообрабатывающего орудия установлен датчик 13 вертикального ускорения, на одной из нижних тяг 5 размещен датчик 14 углового перемещения стойки 4. Датчики 13 и 14 подключены к входам блока 15 управления, а исполнительные механизмы золотников 11 и 12 гидрораспределителя подключены к выходам блока 15 управления.
Устройство работает следующим образом.
На трактор 6, оборудованный передним навесным устройством, навешивают почвообрабатывающее орудие. Раму 1 соединяют с нижними тягами 5, а стойку 4 - с гидроцилиндром 7. Опорные колеса 2 устанавливают по высоте и тем самым задают глубину обработки почвы рабочими органами 3. В качестве рабочих органов 3 используют, например, стрельчатые лапы или диски.
Золотники 11 и 12 гидрораспредилителя трактора 6 переводят из одного положения в другое исполнительные механизмы, подключенные к выходам блока 15 управления. Перемещение штоков гидроцилиндров 7 и 10 за одно включение гидрораспредилителя перемещаются с заданным шагом, значение которого как постоянную величину вводят в блок 15 управления, чтобы ускорить и повысить точность установки верхней тяги параллельно направлению действия силы сопротивления почвы на рабочие органы 3.
Далее агрегат начинает движение и обработку почвы. Сигналы от датчика 13 вертикального ускорения и датчика 14 углового перемещения через заданные интервалы времени поступают в блок 15 управления через заданные интервалы времени в течение определенного периода. В блоке 15 управления происходит обработка сигналов от датчиков 13 и 14: определяют математическое ожидание массива значений вертикального ускорения и контролируют положение стойки 4 относительно рамы 1.
Если нарушается параллельное положение верхней тяги относительно направления действия силы сопротивления почвы на рабочие органы 3, то математическое ожидание вертикального ускорения не равно нулю. В зависимости от знака отклонения математического ожидания опускают или поднимают корпус гидроцилиндра 7, чтобы восстановить параллельное положение верхней тяги.
Положительное значение отклонения математического ожидания - выглубление рабочих органов 3, отрицательное - заглубление рабочих органов 3. Выглубление стрельчатых лап устраняют опусканием корпуса гидроцилиндра 7, а дисков - подъемом корпуса гидроцилиндра 7.
Одновременно с восстановлением параллельного положения верхней тяги проверяют по показаниям датчика 14 параллельность рамы 1 поверхности почвы, которую поддерживают, изменяя длину верхней тяги ходом штока гидроцилиндра 7.
Управление золотниками 11 и 12 гидрораспределителя трактора 6 осуществляют вручную через блок 15 управления или автоматической системой по показаниям датчиков 13 и 14.
Предлагаемый способ регулирования обработки почвы и устройство для его осуществления могут быть использованы на сельскохозяйственных агрегатах, содержащих размещенные на переднем навесном устройстве тракторов орудия и машины.
Применение предлагаемого способа регулирования глубины обработки почвы и устройство для его осуществления не оказывает отрицательного влияния на окружающую среду, так как данное изобретение способствует повышению качества обработки почвы и снижению удельных затрат энергии на ее обработку.
1. Способ регулирования глубины обработки почвы, включающий установку опорных колес почвообрабатывающего орудия на заданную глубину обработки почвы, регулирование положения верхней и нижних тяг переднего навесного устройства трактора относительно поверхности почвы, отличающийся тем, что после заглубления рабочих органов раму почвообрабатывающего орудия и нижние тяги располагают параллельно поверхности почвы, а верхнюю тягу устанавливают параллельно направлению действия силы сопротивления почвы на рабочие органы почвообрабатывающего орудия, параллельное положение верхней тяги контролируют по наличию нулевого значения математического ожидания вертикального ускорения, измеряемого в центре тяжести почвообрабатывающего орудия, причем верхнюю тягу концом, соединенным с почвообрабатывающим орудием, на культивации направляют вверх, а на дисковании вниз относительно поверхности почвы.
2. Устройство для регулирования глубины обработки почвы, содержащее переднее навесное устройство трактора с верхней и нижними тягами, раму почвообрабатывающего орудия со стойкой, отличающееся тем, что верхняя тяга выполнена в виде гидроцилиндра и двуплечего рычага, причем гидроцилиндр штоком шарнирно соединен со стойкой рамы почвообрабатывающего орудия, а корпусом шарнирно соединен с одним концом двуплечего рычага, который шарнирно установлен на оси верхней тяги навесного устройства, и другим концом посредством гидроцилиндра шарнирно соединен с рамой трактора, на раме почвообрабатывающего орудия в центре тяжести установлен датчик вертикального ускорения, а на нижней тяге установлен датчик углового перемещения стойки рамы, датчики ускорения и углового перемещения подключены к входам блока управления, а гидрораспределитель навесного устройства подключен к выходам блока управления.
Читайте также: