
Посадка бурана в автоматическом режиме история
Обновлено: 07.07.2024
Максимальная стартовая масса:
Масса полезного груза:
Масса возвращаемого груза:
Высота (на шасси):
Сопоставление размеров некоторых пилотируемых космических объектов
Путь наверх
(4 боковых блока):
Довывод на орбиту
2960–3224 тонн-силы (тс)
Мощность двигателей Space Shuttle
(2 твердотопливных боковых ускорителя):
с внешним топливным баком):
Довывод на орбиту
2660–3100 тонн-сил (тс)
Запуск двигателей первой и второй
Старт, начало разгона и набора высоты
Выключение двигателей и отделение
4 блоков первой ступени
Выключение двигателей второй ступени
Отделение корабля от второй ступени
Довывод на орбиту короткими
импульсами орбитальных двигателей
Запуск маршевых двигателей
Запуск блоков первой ступени,
старт, начало разгона и набора высоты
Отделение 2 блоков первой ступени
Выключение маршевых двигателей
Отделение внешнего топливного бака
Довывод на орбиту короткими
импульсами орбитальных двигателей
Предел полезной нагрузки (тонн), выводимой на низкую околоземную орбиту
Низкая околоземная орбита
Условная граница атмосферы
Разворот корабля двигателями по курсу,
тормозной импульс, начало снижения
Выключение двигателей, разворот корабля
носом по курсу, подготовка к вхождению
в плотные слои атмосферы
интенсивное торможение, нагрев
Полёт в режиме планирования,
выход на посадочную траекторию
Мягкая посадка на ВПП
Белая плитка (крупная):
Белая плитка (малая):
Тепловая защита (вид снизу)
и передняя кромка крыла:
Взлётно-посадочная полоса (вид сверху)
(Смещение от оси
от оси на 9,4 м вправо)
На протяжении всего финального этапа полёта, в том числе во время незапланированного манёвра корабля, его сопровождал МиГ-25 под управлением лётчика-испытателя Магомеда Толбоева. Уникальные кадры, снятые из кабины этого истребителя, были предоставлены нам Телестудией Роскосмоса.
Полоса там идеальная. Когда она строилась, солдаты шлифовали её вручную, я своими глазами видел. Когда Глеб Евгеньевич Лозино-Лозинский проверял её качество, то он поставил на капот машины стакан с водой и проехал по полосе. Вода не пролилась. Такое было качество.
Один за всех

А потом было мутное безвременье, а потом, в 1993 году, закрытие программы…
Когда-нибудь я соберусь и напишу, как происходит режим полунатурного моделирования – для этого и других случаев. А пока я только хочу объяснить состав нашего отделения – того коллектива, который всё это делал. В нём был комплексный отдел, который разбирался с датчиковыми и исполнительными системами, задействованными в наших программах. Был алгоритмический отдел – эти собственно писали бортовые алгоритмы и отрабатывали их на математическом стенде. Наш отдел занимался а) переводом программ на язык БЦВМ, б) созданием специального оборудованием для полунатурного стенда (здесь я и работал) и в) программами ля этого оборудования.
В нашем отделе были даже свои конструкторы, чтобы делать документацию для изготовления наших блоков. И ещё был отдел, занимавшийся эксплуатацией помянутой спарки ЕС-1061.
Итак, прошли полноразмерный стенд. Думаете, это всё? Нет.
Кстати, это довольно-таки понятно. Пока аппарат в воздухе, у него нет ограничений на вращения вокруг всех трёх осей. И вращается он, как положено, вокруг центра масс. Вот он коснулся полосы колёсами основных стоек. Что происходит? Вращение по крену теперь невозможно вообще. Вращение по тангажу идёт уже не вокруг центра масс, а вокруг оси, проходящей через точки касания колёс, и оно пока свободное. А вращение по курсу теперь сложным образом определяется соотношением управляющего момента от руля направления и силы трения колёс о полосу.
…Добавлю, что неполадки, понятные и непонятные, со всех этапов испытаний привозились к нам, анализировались, устранялись и снова шли по всей линии, от математического стенда до БТСа в Жуковском.
Ну вот. Все знают, что посадка прошла безупречно: ошибка по времени 1 секунда – после трёхчасового полёта! – отклонение от оси полосы 1,5 м, по дальности – сколько-то десятков метров. Наши ребята, те, которые находились в КДП – это служебное здание возле полосы – говорили, что ощущения были – словами не выразить. Ещё бы – они-то знали, что это такое, сколько там всего правильно сработало, какие миллионы взаимосвязанных событий произошли в нужной взаимосвязи, чтобы могло состояться это приземление.

Кратко о программе
Как садился Буран
Оставим за рамками этой статьи этапы взлета, выхода на орбиту и маневрирования, стыковки и работы с полезным грузом. Рассмотрим подробнее посадку.
- Сход с орбиты
- Гашение орбитальной скорости в атмосфере
- Маневрирование для захода на полосу
- Посадка на полосу
Задачей следующего этапа становится выход в заданную точку в окрестностях аэродрома приземления с заданной скоростью и ориентацией. Задача осложняется несколькими моментами: во-первых большую часть путь корабль летит в облаке плазмы и не имеет возможности связи с землей, во-вторых к моменту начала аэродинамического торможения в атмосфере топливо для маршевого двигателя уже выработано, поэтому маневр увеличения скорости при обнаружении недолета невозможен, возможно только управление планером корабля при помощи рулевых двигателей малой тяги и элевонов.
Образно говоря, для гашения лишней скорости при перелете система управления должна немного задрать нос, повысится аэродинамическое сопротивление и скорость снизится, а для компенсации недолета — наоборот, опустить нос. Это, конечно, очень грубое приближение, но по сути оно верное.
Затем следует самый сложный этап посадки — выход на посадочную полосу. Автоматика, используя датчики корабля, показания радиомаяков и поток информации из наземного центра управления, должна понять где в настоящий момент находися корабль, оценить силу и направление ветра в районе посадки, принять решение с какого конца ВПП заходить на посадку и зайти на полосу. Допускалась ошибка по скорости не более 20 км/ч, промах по оси ВПП не более 700 метров, боковое отклонение — не более 38 метров.
Хард 'n' Софт
Испытания и полет
Послеполетный анализ показал, что вероятность выбора такой траектории была менее 3%, однако в сложившихся условиях это было самое правильное решение бортовых компьютеров корабля.
Итоги
Кстати, тот корабль, который стоит в Парке Горького не является космическим кораблем, это испытательный самолет-аналог БТС.
О второй части заголовка
Если речь заходит об орбитальных кораблях, то на ум сразу же приходят американские космические челноки.
В этой статье я хотел бы рассказать вам краткую историю о том, насколько успешно справилась техника во время испытаний Бурана. Для тех лет, событие невероятное :)
Весь полёт продлился 205 минут. За это время корабль успел совершить два витка вокруг Земли.
Конечно же, без "приключений" не обошлось. Дело в том, что весь полёт вёлся в автоматическом режиме. Использовался бортовой компьютер и специально разработанное программное обеспечение.
Погодные условия чуть не сорвали все испытания. Дело в том, что на высоте 11 км бортовой компьютер корабля получил с Земли информацию об изменении погодных условий в месте посадки. Это и послужило осуществлению резкого, неожиданного для всех манёвра.
С помощью автоматики корабль совершил плавную петлю с разворотом на 180º . Из-за сильного штормового ветра компьютер сам принял решение погасить скорость и выстроил наиболее удачную, в сложившихся условиях, траекторию посадки! Напомню, что это был 1988 год!
Всё это время корабль действовал самостоятельно. Он пропал из поля зрения наземных устройств наблюдения, а связь и вовсе прервалась.
В центре управления началось сильное волнение. Старшие руководители уже хотели уничтожить Буран, задействовав аварийную систему подрыва корабля (для этого перед полётом на корабле установили тротиловые заряды, которые можно было активировать с Земли, на случай крушения секретного корабля на территории чужого гос-ва).
В это же время корабль без всяких корректировок с Земли снижался по траектории, рассчитанной бортовым цифровым вычислительным комплексом.
Только на высоте 6200 м Буран перехватили наземные радиоприборы "Вымпел-Н", которые поставляли для систем корабля правильную навигационную информацию.
Благодаря работе "Вымпел-Н", вокруг корабля образовалось трехмерное пространство из сигналов с тремя основными навигационными параметрами: азимут, относительно оси ВПП, угол места и дальность с погрешностью не более 65 метров!
Автоматика была скорректирована, тем самым Буран вышел на правильную траекторию посадки.
На высоте 4 км Буран вышел на связь и с ЦУП-ом. Изображение с аэродромных телекамер было направленно точно в то место, где должен был появиться с минуты на минуту корабль! В ЦУП-е настала тишина..
Буран буквально прорезал облака и стремительно направился к ВПП со скоростью.. Внимание.. 40 метров в секунду.
На подходе к ВПП шасси выпустились, корабль задрал нос, создавая воздушную подушку под собой. Буран на мгновение завис над ВПП, после чего совершил плавное касание!
С хема полета на участке посадки "Бурана"
После завершения орбитального полета происходит торможение орбитального корабля (ОК) с помощью двигателей орбитального маневрирования (ДОМ) и переход на траекторию схода с орбиты с учетом входа в атмосферу под углом атаки a=39 0 , обеспечивающим допустимый тепловой режим. По достижении условной границы атмосферы на высоте 100 км начинается участок спуска ОК.

С помощью управляющих двигателей (УД) ОК разворачивается по крену таким образом, чтобы уменьшить боковую дальность до взлетно-посадочной полосы (ВПП) посадочного комплекса (ПК). В начале спуска, когда отсутствует управление продольной дальностью полета, ОК движется с постоянным скоростным углом крена, при этом углы атаки, скольжения и крена стабилизируются с помощью 20 УД, размещенных в хвостовой части фюзеляжа (в двух кормовых блоках), а после входа в атмосферу - аэродинамическими органами управления (элевонами, работающими в режиме руля высоты и в режиме элевонов, и балансировочным щитком).
В начале спуска аэродинамические органы управления обеспечивают только балансировку ОК, а при достижении скоростным напором значения q=10 кг/м 2 подключаются и к управлению угловым движением, причем по мере возрастания эффективности аэродинамических органов управления и скоростного напора они постепенно берут на себя функции управляющих двигателей. Для минимизации расхода топлива УД отключаются при q=50 кг/м 2 в канале крена и при q=100 кг/м 2 в продольном канале (смотри "Аэродинамика Бурана").
При достижении продольной перегрузкой заданного значения начинается участок спуска с управлением дальностью, при этом на основе прогноза движения ОК отыскивается "попадающая" в район ВПП ПК траектория, на которой прогнозируемая дальность спуска равна оставшейся дальности при выполнении ограничений по нагреву, скоростному напору и перегрузкам.
Специальный алгоритм управления вырабатывает командное значение скоростного угла крена, обеспечивающее движение ОК по траектории, близкой к "попадающей". Для того чтобы не допустить больших ошибок по курсу, при заданном рассогласовании по курсу выдаются команды на смену знака командного значения угла крена, т. е. команды на развороты по крену.
При достижении скорости, соответствующей М=12, угол атаки постепенно уменьшается с 39 0 до 10 0 к концу участка спуска, что позволяет увеличить аэродинамическое качество ОК. Начиная с М=10 для обеспечения необходимой балансировки и увеличения устойчивости движения раскрываются створки воздушного тормоза, угол раскрытия которых до скорости, соответствующей М не менее 0.8, изменяется по заданной программе. При М=5 становится достаточно эффективным руль направления, с помощью которого осуществляется балансировка в боковом канале с переходом при скорости, соответствующей М не более 3, в режим управления. УД рыскания работают на спуске до высоты 20 км - начала участка предпосадочного маневрирования, к моменту которого выполняются ограничения на координаты, величину и направление вектора скорости ОК: корабль должен находиться в кольце на расстоянии Lк=(32 плюс-минус 13) км, измеряемом по касательной к цилиндру рассеивания энергии (ЦРЭ), иметь скорость (520 плюс-минус 60) м/с, направление вектора которой должно совпадать с касательной к ЦРЭ (восточному или западному) с допустимой ошибкой не более 15 0 (см. схему предпосадочного маневрирования). Восточный или западный ЦРЭ выбирается в зависимости от направления ветра на ВПП так, чтобы обеспечить полет ОК на заключительном участке траектории в условиях встречного ветра.
Схема предпосадочного маневрирования:
Задачей предпосадочного маневрирования является выведение ОК к началу траектории захода на посадку в ключевую точку (КТ), расположенную на высоте 4 км в вертикальной плоскости, проходящей через ось ВПП, с ориентацией в ней (в плоскости) вектора скорости. Параметры движения ОК в КТ жестко ограничены по координатам, скорости, углу наклона траектории и отклонению от посадочного курса. Их реализация достигается схемой движения, обеспечивающей соответствие между располагаемой энергией ОК и энергией, потребной для приведения его в КТ. Энергия регулируется изменением длины траектории и программного скоростного напора (управление аэродинамическим качеством), а в дозвуковой области - еще и изменением угла раскрытия воздушного тормоза. Управление движением ОК осуществляется формированием в начале участка предпосадочного маневрирования в соответствии с текущим состоянием ОК пространственной опорной траектории (и последующим ее отслеживанием), которая может перестраиваться в ходе полета, если энергетическое состояние ОК не удовлетворяет заданным требованиям.
"След" опорной траектории в горизонтальной плоскости представляет собой систему геометрических линий (см. схему предпосадочного маневрирования): спираль отворота - спираль доворота - касательная к цилиндру выверки курса (ЦВК) - дуга окружности ЦВК - финишная прямая, при этом спирали отворота и доворота соответствуют полету ОК с постоянным углом крена =45 0 , координаты КТ, центров ЦВК и радиусы ЦВК постоянны, а спираль отворота реализуется в случае избытка энергии.
Приземление и пробег ОК происходят по сухой и мокрой бетонной ВПП как в автоматическом, так и в ручном режиме управления при посадочной скорости Vпос=300. 330 км/ч, угле тангажа u=10. 13 0 , при попутном (до 5 м/с), встречном (до 20 м/с) и боковом (до 15 м/с) ветре.
Управление пробегом до опускания передней стойки шасси выполняется в канале тангажа элевонами в режиме руля высоты, в путевом канале - рулем направления, а после опускания носового колеса - управляемой передней стойкой и дифференциальным растормаживанием колес основных стоек шасси.

Алгоритмы управления пробегом ОК сформированы так, что отказ одного из управляющих органов не приводит к потере управляемости и уводу с ВПП при различных сочетаниях ветровых возмущений и отклонений от оси ВПП. Большой объем статистического моделирования, полеты на аналоге и первый орбитальный полет ОК "Буран" подтвердили эффективность управления на пробеге, обеспечившего отклонение от оси ВПП в конце пробега до 5 м в автоматическом и ручном режимах.
Торможение ОК осуществляется трехкупольным тормозным парашютом и тормозами колес основных стоек шасси, а также воздушным тормозом, используемым в качестве резервного при ручном управлении. Суммарный пробег в зависимости от направления и силы ветра и состояния поверхности ВПП не должен превышать 1800 м.
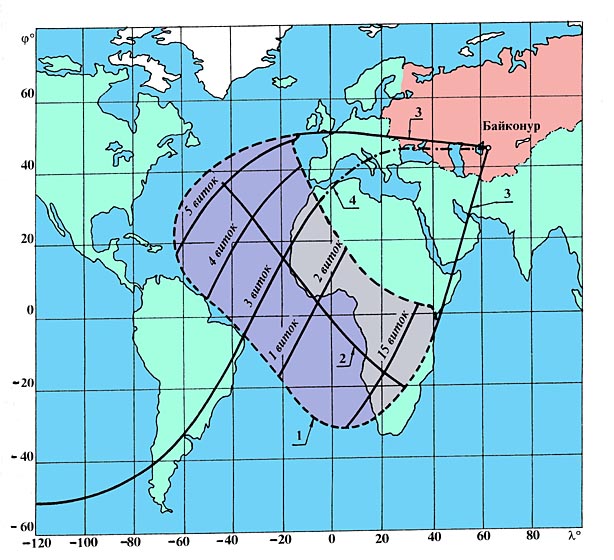
Слева и справа приведены схемы автоматической посадки ОК "Буран" на ВПП полосу космодрома Байконур 15 ноября 1988 года: проекция орбиты на земную поверхность (слева), на которой наглядно видна величина бокового маневра; и справа - последние предпосадочные маневры в учетом сильного бокового ветра. (ЗВУКОЗАПИСЬ ПОСАДКИ)
Подробное описание фактической траектории спуска и посадки ОК "Буран" 15.11.1988 можно найти в ЭКСПРЕСС-ОТЧЕТЕ или на графиках.
Другие видеофрагменты полета и посадки "Бурана" можно увидеть в нашем фото/видео архиве
Читайте также: