
Система посадки вертолета на корабль
Обновлено: 07.07.2024
В современных условиях невозможно обойтись без самого широкого использования авиации корабельного базирования для решения различных задач. Однако сложные метеоусловия, в которых часто приходится находиться кораблям, предъявляют повышенные требования к вопросам обеспечения безопасности полетов и ставят конструкторов перед необходимостью разработки в этих целях специальных технических устройств. Так, вертолеты корабельного базирования наибольшей опасности подвергаются в момент взлета (посадки) с палубы (на палубу) корабля, особенно при волнении моря, когда необходима быстрая фиксация на ней летательного аппарата. Для автоматизации этого процесса в начале 80-х годов английская компания начала разработку автоматического стопорного устройства для вертолетов корабельного базирования типа , которое первоначально представляло собой выдвижную штангу с укрепленным на конце зацепом ( ). В момент посадки вертолета зацеплялся за ячейки прикрепленной к палубе решетки и защелкивался. Впервые такая система нашла практическое применение в индийских ВМС для расширения летных возможностей вертолетов корабельного базирования . Однако она оказалась малоэффективной из-за недостаточной фиксации вертолета на палубе, а также из-за своего большого веса и габаритов. Дальнейшая работа в этой области привела к созданию конструкции, состоящей из двухступенчатой телескопической выдвижной штанги с гидравлическим приводом, способной надежно удерживать летательный аппарат массой до 10 т. Одна из последних модификаций стопорного устройства компании обеспечивала готовность к работе - выдвижение телескопической штанги, автоматический захват ячеек палубной решетки и принятие максимальной нагрузки всего за 1,5 с.
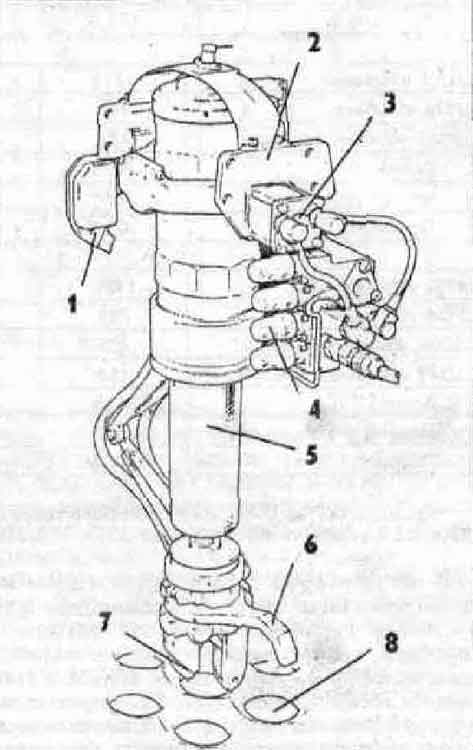
Стопорное устройство вертолетов типа : 1 - запорный механизм; 2 - голонка механизма захвата; 3 - механизм выдвижения штанги; 4 -соленоиды управления клапанами гидросистемы; 5 - двухступенчатая штанга; 6 - рычаг ручного уравления; 7 - устройства захвата; 8 - ячейки палубной решетки
С принятием программы перевооружения корабельной авиации новыми вертолетами ЕН-101 вместо компания разработала стопорное устройство, способное выдерживать нагрузку 15 т (рис. 1). Устройство крепится к фюзеляжу вертолета и подключается к бортовым системам энергоснабжения. Несмотря на то что оно действует полностью автоматически, пилот может вмешиваться в его работу на любом этапе выполнения взлета или посадки. Кроме того, на конце захвата имеется специальный рычаг, служащий для ручного отсоединения штанги и подсоединения ее к транспортиро-вочной системе для буксировки летательного аппарата в ангар.
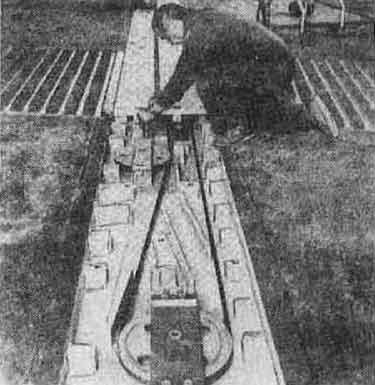

Практика использования данного стопорного устройства позволила уверенно производить посадку и взлет корабельных вертолетов с вертолетных площадок при волнении моря до 6 баллов и скорости ветра до 50 уз. Удобное расположение штанги обеспечивает возможность дозаправки и замену боекомплекта летательного аппарата прямо на площадке, а не в ангаре, как это было принято раньше. Вертолет при необходимости молено разворачивать вокруг своей оси, не снимая с крепления на палубе. Дальнейшие работы в этой области были направлены на снижение массы устройства (до 25 кг) и повышение его надежности. Кроме Великобритании, данная система применяется на кораблях ВМС Австралии, Индии, Нидерландов (рис. 2) и ряда других стран. В США и Канаде для этих же целей используется система RAST (Recovery Assist Secure and Traverse), устанавливаемая на кораблях, оснащенных вертолетами системы LAMPS МкЗ. Ее испытания проводились испытательным центром авиации ВМС США (Патаксент-Ривер, штат Мэриленд) в 1981 году. Система включает две выдвижные стопорные штанги, закрепленные на летательном аппарате, и вспомогательный трос, проходящий через одну из них. Принцип работы заключается в принудительном притягивании зависшего над кораблем вертолета к устройству быстрой швартовки при помощи стального троса с последующим перемещением его в ангар по специальным направляющим трекам. Сначала летчик должен осуществить нормальный заход и зависнуть над палубой на высоте около 4,5 м. Затем с вертолета" подается вспомогательный трос, к которому на палубе крепят силовой трос (рис. 3). Один его конец соединен с гидравлической лебедкой на корабле, а другой при помощи вспомогательного троса поднимается на вертолет и автоматически запирается специальным замком в основной штанге. Посадка вертолета на площадку осуществляется пилотом при тесном взаимодействии с руководителем посадки, в задачу которого входит корректирование действий летчика, чтобы вертолет завис над определенным местом, а также регулирование натяжения силового троса, который летчик в случае необходимости может отсоединить. Силовой трос втягивает основную штангу вертолета в устройство быстрой швартовки, а зажимное приспособление захватывает и стопорит ее. Затем хвостовая штанга опускается в решетку на посадочной палубе, что предохраняет машину от развора-чивания относительно вертикальной оси. По данным зарубежной печати, система RAST обеспечивает безопасную посадку вертолета в море на корабль при бортовой качке до 28°, килевой 5° и скорости подъема палубы 4,5 м/с.
Кто-то считает, что посадка и взлёт вертолётов с борта кораблей это тоже самое, что взлёты и посадки с обыкновенной аэродромной взлётно-посадочной полосы. Это заблуждение! И в этом материале вы узнаете про средства обеспечения посадки и взлёта корабельных вертолётов.

Системы визуальной посадки получили существенное развитие в ОКР "Палубник". В настоящее время выделены четыре направления повышения безопасности посадки и взлёта палубных вертолётов.
Первое. Повышение безопасности захода на посадку и посадки на основе визуальных средств и методов представления летчику информации с корабля на вертолёт, т.е за счёт применения ОСПВ.
Второе. Повышение безопасности полетов вертолетов за счет интеграции средств и методов обеспечения деятельности руководителя полетов стартовых командных пунктов (РП СКП) или за счет создания и применения интегрированных пультов руководителей полетов (ИПРП СКП).
Третье. Повышение безопасности при раскрутке и остановке винтов вертолетов с соосной схемой путем обеспечения летчика и РП СКП информацией о параметрах ветра в зоне приземления вертолета.
Четвертое. Повышение безопасности при взлете вертолета путем указания направления полета с помощью лазерного луча.
В данной статье кратко представлены работы по каждому направлению.
Первое направление
Средства ОСПВ По первому направлению были созданы ИГ, ИК четырёх типов, УИГ и ОКЗ двух типов и на их основе - указатель бортовой качки корабля, ИВП двух типов, ИИВВП и ИПП.
Данные по средствам первого направления представлены на сайте АО НТЦ "Альфа-М"

Второе направление

Третье направление
В рамках третьего направления следует отметить создание индикатора параметров ветра ИПВ, который обеспечивает летчику индикацию направления ветра в горизонтальной плоскости и скорости результирующего вектора потока РВП. При отображении используется цветовое кодирование: красный цвет при скорости выше допустимой, зеленый – ниже.

Указатель направления взлета (УНВ)

Визуальные средства обеспечения посадки вертолётов на корабельные ВППл являются средствами информационного обеспечения лётчика при заходе на посадку и при посадке, т.е. ориентированы на человека.
Известно, что человеко-ориентированные изделия имеют, два типа интерфейса: аппаратный АИ и эргономический ЭИ. АИ – это "железо" изделия. ЭИ – это "интеллект" этого "железа". Соответственно отработка таких изделий ведётся с учётом указанной двойственности. Отработка "железа" ведётся в соответствии с правилами отработки радиоэлектронной аппаратуры, а эргономической – с учётом требований человеческого фактора в определённой сфере его деятельности.
Изделия прошли полный цикл испытаний на соответствие эксплуатационным требованиям (климатические, механические и пр.).
Соответствие изделий требованиям человеческого фактора были подтверждены обширными наземными эргономическими исследованиями и испытаниями с участием летчиков-испытателей.
Московское конструкторское бюро "Компас" по заказу Минобороны разработало спутниковую систему посадки палубных вертолетов. С помощью ГЛОНАСС и GPS она контролирует спуск винтокрылой машины на кормовую площадку корабля при любых погодных условиях. Разработку испытывают на корвете "Совершенный", передает FlotProm
Завершаются государственные испытания спутниковой системы посадки вертолетов Ка-27М на корвет "Совершенный". Посадка производится в автоматизированном режиме. С помощью программно-математических методов принятия решений вертолет по заданной траектории подлетает к кораблю и зависает над взлетно-посадочной площадкой на высоте 30 метров. После чего пилот в ручном режиме сажает вертолет,
- сообщил коммерческий директор по спецпроектам МКБ "Компас" Михаил Пестраков,
Спутниковая система посадки состоит из двух компонентов, один из которых устанавливается на вертолете, а другой - на корабле. Компонентная база разработки - полностью российского производства.

Это ряд заданий, которые необходимо выполнить с заданной точностью. Система анализирует положение вертолета и корабля, учитывает особенности климатической зоны и погодные условия, выбирает траекторию захода на посадку, рассчитывает зависание и саму посадку. Контрольно-измерительная аппаратура фиксирует и обрабатывает результаты по точности, времени, целостности выполнения задачи и прочим условиям испытаний.
За рубежом системы автоматической посадки внедряются для палубных беспилотников. В 2012 году Франция завершила испытания D2AD - комплекса взлетно-посадочного оборудования комбинированного летательного аппарата H-6U, созданного на основе вертолета Boeing MD-530А. Он может управляться человеком, а также работать в беспилотном режиме. D2AD способен функционировать без использования GPS-навигации, ориентируясь на корабельный маяк-ответчик. Испытания на борту фрегата класса La Fayette доказали возможность автоматической посадки при трехбальном волнении, последующее компьютерное моделирование расширило границы применимости D2AD до пятибальной непогоды.
СПУТНИКОВАЯ СИСТЕМА ПОСАДКИ ВЕРТОЛЕТА НА КОРАБЛЬ ССП-К-20380

SATELLITE SYSTEM HELICOPTER LANDING ON THE SHIP THE SSP-K-20380

В корабельной и бортовой части ССП предусмотрен режим, позволяющий прогнозировать местоположение вертолета и корабля соответственно при кратковременных сбоях и пропаданиях сигналов линии передачи данных (ЛПД).
Основные задачи, решаемые ССП:
Информационное обеспечение посадки вертолета на корабль в автоматизированном, директорном и ручном режимах управления;
Расчет и построение заданных (расчетных) траекторий захода на посадку вертолета на корабль;
Определение прямоугольных (в системе Гаусса-Крюгера) и цилиндрических (дальность, азимут, высота) координат вертолета относительно корабля (центра взлётно-посадочной полосы (ВПП)), а также расчет дальности вертолета до заданной точки посадки (зависания), скорости сближения вертолета, уклонений от заданной траектории по данным, полученным от корабля;
Формирование и выдача информации и сигналов управления в цифровой и аналоговой форме для управления и контроля процессом посадки вертолета на корабль.
* Для инозаказчика предоставляется ВТ код в соответствии со специальным разрешением Правительства РФ.
Основные особенности изделия ССП:
ССП формирует заданные траектории захода на посадку вертолета на корабль, выдачу ее параметров на индикаторы вертолета, САУ и корабль при взаимодействии с системами и комплексами корабля;
ССП обеспечивает определение относительных навигационных параметров движения и передачу данных параметров движения с передачей их как с вертолета на корабль, так и с корабля на вертолет;
ССП обеспечивает непрерывное автоматическое определение и выдачу потребителям географических координат местоположения и 3-х составляющих путевой скорости вертолета и корабля во всем диапазоне географических координат;
ССП обеспечивает функционирование при пропадании информации от КНС ГЛОНАСС/GPS за счет резервного контура, реализованного от бортовых инерциальных систем и по информации от БРЛС;
ССП формирует и выдает на индикацию и в САУ информацию для управления вертолетом в следующих режимах:
- полет по траектории возврата и предпосадочного маневра в горизонтальной и вертикальной плоскостях;
- полет по траектории маневра в горизонтальной и вертикальной плоскостях при уходе на второй круг.

ССП состоит из:
бортовой части (изделие ССП-В-27М);
корабельной части (изделие ССП-К-20380).
Состав аппаратуры ССП:
Бортовая часть:
1. Модернизированный приемник ГЛОНАСС/GPS
(изделие ССП-В-27М);
2. Антенна приемника ГЛОНАСС/GPS (блок АВ);
3. Аппаратура приема-передачи ИРС-929Д;
4. Блок сопряжения БС-252;
5. Блок переключения сигналов БПС-252.
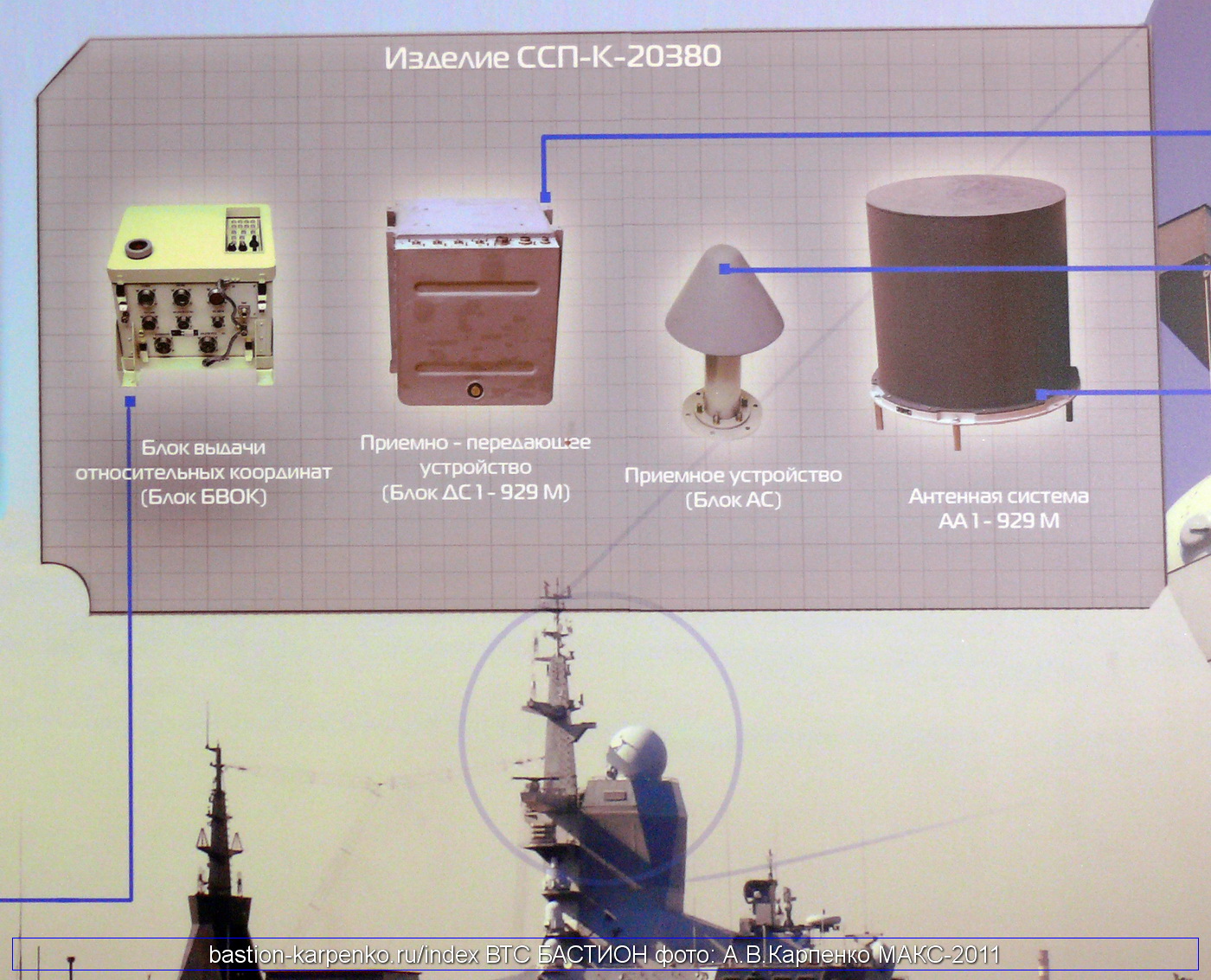
Корабельная часть:
1. Блок выдачи относительных координат (БВОК) со спутниковым навигационным приемником (СНП);
2. Аппаратура приема-передачи данных 929М1И1;
3. Блок АС;
4. Запасное имущество и принадлежности (ЗИП).

Аппаратура (бортовая и корабельная) имеет: 24 параллельных канала приема сигналов КНС ГЛОНАСС СТ, L1* и GPS С/А, L1.
Рабочая зона и дальность действия аппаратуры ССП-К-20380 (без учета условий размещения на корабле):
- угловой сектор по азимуту: 350°;
- по углу места от минус 15° до минус 30° относительно горизонтальной плоскости;
- максимальная дальность действия линии передачи данных не менее 100 км в пределах прямой видимости.
Погрешность определения относительных навигационных параметров вертолета в пределах рабочей зоны и действия корабельной части ССП (1σ):
-по относительным координатам (X, Y, Z) в корабельной стабилизированной системе координат – не более 1 м;
- по составляющим вектора относительной скорости (VX, VY, VZ) –
не более 0,1 м/с.
ССП обеспечивает свое функционирование и выполнение требований на стопе, на ходу и при качке корабля, характеризующейся параметрами:
- бортовая качка до 10° с периодом от 8,5 с до 18 с;
- килевая качка до 3° с периодом до 8 с;
- вертикальное перемещение кормового среза ВПП до 4,5 м
с периодом 8 с;
- рысканье до 3° с периодом 20 с.
Читайте также: