
Специальный аппарат для посадки на луну и марс
Обновлено: 06.07.2024
ПРОШЛОЕ
Потерпев сокрушительное поражение в лунной гонке, руководство СССР сделало вид, что вообще не планировало посылать космонавтов на Луну (еще как планировало!) и декларировало упор на изучение Солнечной системы автоматическими аппаратами.
ПрОП-М (Марс, 1971)
Самоходный ящик на лыжах – Прибор оценки проходимости — Марс
Lunar Roving Vehicle (Луна, 1971–1972)
Один из самых дорогих автомобилей в истории человечества – LRV Apollo 17
Лунный багги возле спускаемого модуля Apollo 16
Астронавты накатали по Луне 27,8 км, 27,1 км и 35,74 км во время высадок Apollo 15, 16 и 17 соответственно. Причем если в первых двух миссиях им было запрещено сильно удалятся от посадочного модуля, то во время последней высадки астронавты уговорили ЦУП разрешить им более продолжительные поездки.
Экипаж Apollo 16 во время наземных тренировок, колеса лунного баги еще резиновые
Лунное багги могло перевозить двух астронавтов в скафандрах. LRV имело 4 ведущих колеса, каждое с собственным электродвигателем мощностью в 0,25 лошадиной силы, питаемых двумя серебряно-цинковыми аккумуляторами (очень дорогие батареи с высокой удельной энергоемкостью) по 121 Ач. Теоретически этого должно было хватить на 92 км пробега, но так много ни один из LRV не наездил. Поворот осуществлялся с помощью двух дополнительных моторов, причем задние и передние колеса поворачивались в разные стороны, что позволило добиться радиуса разворота всего 3 м. Вес лунного багги на Земле составлял 210 кг, а на Луне всего-то 35 кг.
LRV Apollo 15. Обратите внимание на пачку карт, закрепленных перед водителем. Навигаторов и планшетных ПК в 1971 году еще не было
Разработкой ровера занимались Boeing и General Motors. GM создала уникальные упругие колеса c алюминиевыми дисками и плетенной из оцинкованной стальной проволоки покрышками c титановыми полосами в качестве протекторов. Закрывали колеса пылевые щитки. Во время миссии Apollo 17 один из астронавтов случайно повредил крыло лунного багги, что создало серьезные проблемы во время движения, пассажиров буквально засыпало чрезвычайно прилипчивой лунной пылью. В итоге щиток-пыльник удалось заменить конструкцией из лунных карт, прикрепленной с помощью скотча!
То самое поврежденное крыло. С помощью скотча можно отремонтировать почти все
Sojourner (Марс, 1997)
Более чем 20-летний мертвый период в истории внеземных роверов закончился в 1997 году. Началась марсианская гонка, правда кроме NASA к ней пока никто не присоединился.
Миниатюрный марсоход Sojourner стал частью автоматической космической станции Mars Pathfinder, запущенной к Красной планете в декабре 1996 г. Аппарат размером с крупную радиоуправляемую машинку весил всего 11,5 кг (около 4 кг на Марсе) и не должен был удаляться от базовой станции Pathfinder далее 500 м. За время миссии, длившейся 83 марсианских дня вместо 30 запланированных, малыш прошел всего 100 м.
Всю верхнюю панель марсохода занимала солнечная батарея, вырабатывающая около 15 Вт энергии. Компьютер Sojourner был построен на базе процессора Intel 80C85 с тактовой частотой 2 МГц. Эта усовершенствованная версия чипа Intel 8080, представленного еще в 1976 году, за 20 лет до запуска Pathfinder! Компьютер содержал четыре типа памяти: 64 КБ оперативки, 16 КБ устойчивой к радиации постоянной памяти, 176 КБ перезаписываемой памяти и SSD на 512 КБ. Две фронтальные камеры марсохода имели разрешение 768×484 пикселя, что позволило создавать вполне приличные панорамы на основе серии снимков.
На этом снимке Sojourner хорошо виден спускаемый аппарат Pathfinder
Несмотря на наличие компьютера, управление ровером осуществлялось с Земли. Специальный софт Rover Control Software запускался на рабочих станциях Silicon Graphics Onyx2, а команды можно было отдавать с помощью графического интерфейса. Окружающую местность операторы изучали в 3D-очках, изображение на которых формировалось с камер посадочного модуля.
Planetary Undersurface Tool (Марс, 2003)
Spirit (Марс, 2004–2010)
Spirit на Марсе. Изображение ровера добавлено на фото искусственно
Программа NASA Mars Exploration Rover Mission (MER) включала отправку на Марс двух более крупных и совершенных чем Sojourner роверов. MER-A Spirit и MER-B Opportunity стартовали к Красной планете 10 июня и 7 июля 2003 года соответственно. Их ждала совершенно разная судьба.
С самого начала роверы отличались характерами и вели себя по-разному. Spirit конструировался и собирался первым, и все возникающие в процессе разработки проблемы по умолчанию доставались ему. В Opportunity же применялись уже найденные и обкатанные на первенце решения.
Упаковка Spirit перед запуском. Солнечные панели собраны, колеса поджаты
Шестиколесные MER были крупней предшественника. Высота роверов с выносной мачтой для камер составляла 1,5 м, ширина 2,3 м и длина 1,6 м, при этом вес марсоходов на Земле был равен 185 кг – 64 кг на Марсе.
Солнечные панели, в разложенном состоянии напоминающие надкрылья большого жука, в начале миссии выдавали 140 Вт энергии и заряжали две литий-ионные батареи ровера. Запыление панелей существенно снизило их мощность, кроме того, аккумуляторы, время работы которых более чем в 20 раз превысило расчетное, успели деградировать.
Spirit покинул посадочную платформу 18 января 2004 г.
В отличие от Sojourner компьютер MER может принимать навигационные решения самостоятельно, ориентируясь на базовые указания с Земли. Система работает под управлением ОС VxWorks от Wind River, дочерной компанией Intel. VxWorks, разрабатываемая с 1987 г., используется во встраиваемых системах в космической и авиационной технике, автомобилях, сетевом оборудовании, индустриальных роботах, медицинских приборах и т.д. Несмотря на тесную связь Wind River и Intel, компьютеры марсианских роверов второго поколения построены на базе специальных чипов IBM RAD6000 (на текущий момент производятся BAE Systems) с защитой от космической радиации. Стоимость одного такого чипа составляет $200-300 тыс. при максимальной тактовой частоте 33 МГц.
Компьютеры Spirit и Opportunity еще скромней. В них используется процессор BAE RAD6000 с частотой 20 МГц. Система оснащена 128 МБ RAM, 256 МБ флеш-памяти и 3 МБ энергонезависимой памяти EEPROM. В связи с задержкой сигнала в системе Земля–Марс (от 8 до 42 минут) и из-за того, что прямые сеансы связи с ровером возможны лишь несколько раз в день, команды на перемещение передаются раз в сутки. Автономное ПО осуществляет выбор направления движения на базе 15-40 тыс. точек, считываемых с 3D-снимков, полученных стереокамерами марсохода.
Заход Солнца на Марсе, 2005 г.
Spirit стал первым межпланетным аппаратом, которому дистанционно обновляли программное обеспечение. Первый сбой работы компьютера произошел буквально на 18 день работы – марсоход ушел в циклическую перезагрузку и не отвечал на команды с Земли. Виновато оказалось ПО управления флеш-памятью. Проблемные файлы удалили дистанционно, файловую систему переформатировали.
Следующее несчастье настигло Spirit в 2006 году. У ровера начались проблемы с правым передним колесом, которое в конечном итоге перестало вращаться. В итоге ПО марсохода было модифицировано так, что теперь Spirit ехал задом наперед, волоча за собой нерабочее колесо.
Запыление солнечных панелей Spirit привело к недостатку энергии. 2007 г
Пылевой вихрь на Марсе. Во-первых, это красиво. Во-вторых, он очистил солнечные панели ровера от пыли
Планировалось, что Spirit и Opportunity проработают на Марсе 90 дней, но оба аппарата более чем в 20 раз превысили расчетный срок службы. Spirit функционировал 2269 суток (2208 марсианских дней), последние 325 суток в качестве неподвижной научной станции. Ровер застрял в песке, и, хотя это было уже не первое подобное происшествие в ходе миссии, в этот раз высвободить его не удалось. Причем застрял Spirit под неправильным углом к солнцу и батареи стали вырабатывать энергии меньше, чем требовалось. В итоге аппарат был обесточен и замерз. Одометр Spirit намотал с начала миссии 7730 м.
НАСТОЯЩИЕ
Opportunity (Марс, 2004–)
Opportunity на Марсе, 3D-графика
К полностью идентичному Spirit роверу Opportunity Марс был благосклонней. Аппарат проработал уже более 11 лет, накатал 42 км, установив рекорды и длительности пребывания на другой планете, и дальности перемещения на внеземном небесном теле.
Путешествие Opportunity началось с падения в небольшой кратер, который даже не заметили на орбитальных снимках. Дело в том, что при приземлении (примарсении) MER некоторое время прыгает по поверхности Марса в коконе из специальных амортизирующих подушек, так что он просто запрыгнул в кратер.
Одна из первых панорам Opportunity. Выход горной породы появился благодаря протекавшей здесь когда-то воде
За свое долгое путешествие Opportunity несколько раз занимался рытьем траншей на Марсе. Т.к. соответствующего инструмента у него нет, делать это приходилось с помощью колеса, заблокировав остальные. Спускался в глубокие кратеры без надежды выбраться. Исследовал первый метеорит на поверхности иного небесного тела. Застревал в дюнах, 40 дней выбираясь в прямом смысле слова по сантиметру. Попадал в пылевые бури теряя энергию. Но во всех случаях выходил победителем.
Наземное тестирование MER на различных типах грунта
В 2005 г. марсоход получил обновление ПО, фиксирующие прокрутку колес и блокирующие их в случае опасности застрять.
Одной из серьезных поломок Opportunity стал отказ одного из двигателей манипулятора в 2008 г., хотя проблемы с механической рукой начались уже на второй день миссии еще в 2004 г. Чтобы избежать заклинивания его в нерабочем положении, ученые решили перемещать ровер с развернутым манипулятором, что увеличивало риск его поломки. Как и Spirit, с этого момента Opportunity двигается задом наперед.
В 2014 г. ровер постигли проблемы с флеш-памятью, аналогичные тем, что были в свое время у Spirit. Несколько перезагрузок бортового компьютера привели марсоход в порядок. В 2015 году проблема с памятью вернулась, было проведено ее форматирование.
Крупный кратер Индевор, объект изучения Opportunity на протяжении последних лет
На текущий момент Opportunity продолжает свою миссию, хотя часть его научных приборов уже не функционирует, один обогреватель вышел из строя, солнечные панели выдают намного меньше энергии, чем в начале миссии, а аккумуляторы хуже держат заряд.
Spirit и Opportunity имеют один на двоих твиттер-аккаунт. Кроме того, за ходом миссии можно наблюдать на официальной страничке NASA или на специальном сайте, посвященном исследованиям Марса.
Curiosity (Марс, 2013–)
Лучшее в мире селфи. Curiosity делает фотографии самого себя для того, чтобы ученые могли оценить состояние ровера
Curiosity, или Mars Science Laboratory, — самый совершенный на сегодня внеземной ровер. При его конструировании был учтен опыт MER, и именно его платформа станет основой для следующих роботизированных миссий на Марсе.
Бортовой компьютер Curiosity построен на базе чипа BAE RAD750, наследника того самого RAD6000, который использовался в роверах MER. Защищенный от радиации RAD750 – это предназначенная для работы в экстремальных условиях версия процессора IBM PowerPC 750, того самого, на базе которого создавали все компьютеры Apple после возвращения в компанию Стива Джобса в 1998 г. На PowerPC 750 строились оригинальный iMac, PowerBook G3, iBooks, Power Macintosh. Правда, стоимость RAD750 на два порядка выше, чем у коммерческих процессоров – около $200 тыс. за штуку.
У Curiosity два компьютера, основной и резервный. Оба оснащены процессорами BAE RAD750 с частотой 132 МГц, 256 МБ RAM, 2 ГБ флеш-памяти и 256 КБ EEPROM. Управляет системой все та же ОС VxWorks от Wind River. Во время миссии ученым пришлось переключить работу ровера на резервный ПК, неполадки в основной системе уже ликвидировали.
Панорама в честь пробега 10 км
С учетом результатов, показанных предыдущими роверами, ученые распланировали миссию Curiosity на 687 дней. На текущий момент идут уже 992 сутки пребывания аппарата на Марсе, а его пробег составляет 10 км, но на нескольких титановых колесах марсохода уже появились серьезные повреждения.
Curiosity тоже ведет твиттер и страничку на Facebook. Массу интересного можно найти и на официальных страницах проекта на сайте NASA или JPL.
Три поколения марсианских роверов: Sojourner, MER (Spirit и Opportunity) и Curiosity
Yutu (Луна, 2013– )
Конструкционно китайский Yutu представляет собой синтез советских и американских наработок
Вид на ровер Yutu с посадочного модуля Chang'e 3
Шестиколесный Yutu имеет сравнимые с роверами MER габариты 1,5×1×1,1 м и массу 140 кг (23 кг на Луне). Питание лунохода осуществляется от солнечных батарей, а обогрев от радиоизотопного нагревателя. Миссия Yutu была рассчитана на 3 месяца, в течении которых ровер должен был пройти 10 км.
К сожалению, этим планам не суждено было сбыться. На 42 день после посадки, пережив две лунных ночи, проведя ряд экспериментов и передав на Землю фотографии Луны и посадочного модуля, Yutu проехал всего 100 м и потерял способность двигаться. На текущий момент ровер работает в стационарном режиме, постепенно разрушаясь и замерзая. В ближайшие месяцы связь с ним будет окончательно потеряна.
БУДУЩЕЕ
Только три страны имеют опыт доставки внеземных машин на Марс и Луну, причем последний успех СССР/России в этой области приходился на начало 70-х годов прошлого века. В новом тысячелетии все может измениться – космические программы многих стран включают в себя отправку роверов на планеты Солнечной системы и их спутники. Кроме того, к государственным институтам вскоре добавятся аппараты частных компаний и групп энтузиастов.
Марсианская программа NASA включает в себя отправку следующего ровера в 2020 году. Построенный на базе платформы MSL Curiosity, аппарат будет нести несколько иной набор научных инструментов, состав которых еще обсуждается.
Китай
Индия
Возможный внешний вид ровера Chandrayaan-2
Доставить собственный ровер на поверхность Луны в 2017 г. планируют индийские ученые. Миссия Chandrayaan-2 включает в себя посадочный модуль и ровер массой 30–100 кг. Изначально программа разрабатывалась в сотрудничестве с Российским космическим агентством, которое отвечало за посадочный модуль, но, в связи с затяжкой сроков и противоречивыми требованиями к массе полезной нагрузки, контракт был разорван, и индийская сторона планирует реализовать проект самостоятельно.
Европа
Внешне ровер ExoMars похож на MER/MSL
Япония
Так видят в JAXA посадку аппарата SLIM на Луну
Как раз во время написания этой статьи, японское космическое агентство JAXA сообщило о подготовке к высадке на Луну собственного ровера SLIM (Smart Lander for Investigating Moon) в 2018 г. Отставание от Китая в области космических исследований должно быть особенно обидно для потомков самураев.
Google Lunar X PRIZE
Импульс к негосударственному исследованию Луны дал учрежденный Google в 2007 г. приз Google Lunar X PRIZE. Участники соревнования должны разработать, запустить и посадить на спутник Земли ровер, который проедет не менее 500 м и передаст фотографии в высоком разрешении. Призовой фонд конкурса на текущий момент составляет $30 млн. Первоначально конкурс планировали завершить в 2012 г., но, как показал опыт, организаторы были слишком оптимистичны и deadline уже несколько раз переносился. Текущая финальная дата – 31 декабря 2016 г.
По последним данным в конкурсе осталось 18 команд. Часть уже продемонстрировала рабочие образцы роверов, а две команды даже зарезервировали себе место на ракетоносителе SpaceX Falcon 9, запуск которой планируется на вторую половину 2016 г.
Возможная конфигурация лунного ровера Hakuto
Одна из этих команд – Astrobotic Technology (США), чей посадочный модуль будет нести как собственный луноход Red Rover, так и японский аппарат Hakuto. Неплохие шансы и у компании Moon Express (США), которая планирует в дальнейшем развивать добычу полезных ископаемых на Луне. Вниманием организаторов отмечены также индийская Team Indus и немецкая Part-Time Scientists.
ЕЩЕ ДАЛЬШЕ
Для тех, кто хочет знать больше
Подписывайтесь на наш нескучный канал в Telegram, чтобы ничего не пропустить.
Посадочный модуль — космический аппарат, предназначенный для посадки на поверхности астрономического объекта. Частным случаем посадочного модуля может являться спускаемый аппарат — отделяющаяся часть другого космического аппарата.
Содержание
Модули для посадки на кометы и астероиды
Посадка на подобном малом теле, астероиде 433 Эрос, была проведена зондом NEAR Shumaker, несмотря на тот факт, что NEAR не разрабатывался для посадки.
Зонд исследования плотных слоев атмосферы Юпитера
Лунные посадочные модули
Исторический обзор
Лунные спускаемые модули Аполлонов и Луноходов использовали ракетные тормозные системы для мягкой посадки астронавтов и везедеходов на поверхность Луны.
Что планируется
Посадочный модуль на Титан
Зонд Гюйгенс, который нес на себе космический аппарат Кассини, специально был разработан для посадки как на твердую, так и на жидкую поверхность. Его тщательно тестировали, проводя тестовые сбросы, чтобы быть уверенным, что он сможет пережить посадку и функционировать по меньшей мере 3 минуты. Однако посадка оказалась не такой жесткой, как планировалось и зонд проработал более двух часов после посадки.
Посадочные модули для планет земного типа
Планеты земного типа часто являются целью миссий с использованием посадочных модулей. Пока не предпринималось попыток посадки на Меркурий(в ФКП России на 2010 - 2020 года был включен проект Меркурий - П, планируется к запуску в 2019 году), но Марс и Венера были исследованы.
Венера



Планетоход — это космический аппарат, предназначенный для передвижения по поверхности другой планеты или небесного тела. Некоторые планетоходы были сконструированы для перемещения членов экипажа космической экспедиции; другие были исследовательскими аппаратами — дистанционно управляемыми роботами.
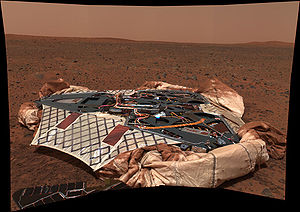
![MER_Spirit_Lander_Pan_Sol16-A18R1_br2[1]](https://aboutspacejornal.net/wp-content/uploads/2016/02/MER_Spirit_Lander_Pan_Sol16-A18R1_br21.jpg)
Посадочный модуль, доставивший планетоход Спирит на Марс
Планетоходы доставляются на поверхность исследуемого небесного тела при помощи посадочных модулей, которые могут являться как самостоятельными космическими аппаратами, так и отделяемыми спускаемыми аппаратами.
Все когда-либо использовавшиеся в космосе планетоходы были либо исследовательскими, либо транспортными.
Исследовательские планетоходы предназначены для проведения научных исследований небесного тела. Такие планетоходы могут быть дистанционно управляемыми или частично автономными или полностью автономными.
Транспортные планетоходы предназначены для перемещения космонавтов и грузов. Такие планетоходы с экипажем на борту управляются непосредственно космонавтами или являются дистанционно управляемыми или частично автономными или полностью автономными.
В будущем возможно также использование планетоходов для проведения строительных работ, как передвижных ретрансляторов и передвижных убежищ.
Кроме того, подобные планетоходам дистанционно управляемые аппараты могут использоваться на Земле для выполнения работы, опасной для людей — например, при разминировании или в условиях высокой радиоактивности.
Планетоходы обладают несколькими преимуществами перед неподвижными аппаратами: они обследуют бо́льшую территорию, могут уже в процессе работы направляться для исследования заинтересовавших учёных объектов, способны менять положение относительно Солнца, чтобы эффективно использовать солнечные батареи в зимний период. Кроме того, подобные аппараты вносят вклад в развитие систем дистанционного управления подвижными роботами.
Преимущества перед орбитальными аппаратами — это способность проводить исследования объектов размером вплоть до микроскопического и выполнять эксперименты. Недостатками по сравнению с орбитальными аппаратами является более высокая вероятность неудачи миссии, вследствие сложности посадки или других проблем и ограниченность исследуемой площади районом места приземления (который может быть задан лишь приблизительно).
Планетоходы доставляются на объект исследования космическими кораблями и работают в условиях, сильно отличающихся от земных. Это вызывает некоторые специфические требования к их устройству.
Планетоход должен обладать стойкостью к перегрузкам, низким и высоким температурам, давлению, пылевому загрязнению, химической коррозии, космическому излучению, сохраняя работоспособность без ремонтных работ в течение необходимого для выполнения исследований времени.
Планетоходы (и другие аппараты), находящиеся на небесных телах, значительно удаленных от Земли, не могут управляться в режиме реального времени из-за значительной временной задержки приёма отправленных команд управления и сигналов обратной связи от аппарата. Задержка возникает, поскольку радиосигналу требуется время, чтобы дойти до удаленной планеты или от неё до Земли. Поэтому такие планетоходы способны некоторое время функционировать, в том числе передвигаться и выполнять исследования, автономно благодаря заложенному в них программному обеспечению, получая команды лишь время от времени.
Время (1,28 секунды), за которое радиоволна, пущенная с Земли, достигает Луны. Рисунок выполнен в масштабе.
Первый планетоход, Луноход-1, был доставлен на поверхность Луны 17 ноября 1970 года автоматической межпланетной станцией Луна-17. Предназначался для изучения особенностей лунной поверхности, радиоактивного и рентгеновского космического излучения на Луне, химического состава и свойств грунта. Успешно проработал до 14 сентября 1971 года, после чего вышел из строя. За время нахождения на поверхности Луны проехал 10 540 м, передал на Землю 211 лунных панорам и 25 тысяч фотографий. Более чем в 500 точках по трассе движения изучались физико-механические свойства поверхностного слоя грунта, а в 25 точках проведён анализ его химического состава.
![1024px-Apollo15LunarRover[1]](https://aboutspacejornal.net/wp-content/uploads/2016/02/1024px-Apollo15LunarRover1.jpg)
Второй советский лунный дистанционно-управляемый вездеход был доставлен на поверхность Луны 16 января 1973 года автоматической межпланетной станцией Луна-21. Он был предназначен для изучения механических свойств лунной поверхности, фотосъёмки и телесъёмки Луны, проведения экспериментов с наземным лазерным дальномером, наблюдений за солнечным излучением и других исследований. Аппарат проработал около четырёх месяцев, за это время было проведено 60 сеансов радиосвязи, получено 86 панорам и более 80 тысяч телевизионных снимков лунной поверхности. Были также получены стереоскопические изображения наиболее интересных особенностей лунного рельефа, позволившие провести детальное изучение его строения. В последний раз телеметрическая информация от аппарата была принята 10 мая 1973 года.
Прибор оценки проходимости — Марс (ПрОП-М) — название советских марсоходов. Идентичные марсоходы входили в состав автоматических марсианских станций которые должны были быть доставлены на поверхность Марса в 1971 году спускаемыми аппаратами автоматических межпланетных станций Марс. Спускаемый аппарат Марс-2 разбился 27 ноября 1971 при неудачной попытке мягкой посадки. Спускаемый аппарат Марс-3 совершил мягкую посадку 2 декабря 1971, но сигнал с самой марсианской станции, к которой был подключен по кабелю марсоход, пропал через 14,5 секунд. Информация с марсохода не была получена.
![Pathfinder01[1]](https://aboutspacejornal.net/wp-content/uploads/2016/02/Pathfinder011.jpg)
Марсоход Sojourner исследует камень на Марсе
![800px-NASA_Mars_Rover[1]](https://aboutspacejornal.net/wp-content/uploads/2016/02/800px-NASA_Mars_Rover1.jpg)
Рисунок марсохода Спирит или Оппортьюнити
![1024px-MSL_concept_February_2007_-_PIA09201[1]](https://aboutspacejornal.net/wp-content/uploads/2016/02/1024px-MSL_concept_February_2007_-_PIA092011.jpg)
Рисунок марсохода Кьюриосити
Mars Science Laboratory — миссия НАСА по доставке на Марс и эксплуатации марсохода третьего поколения Кьюриосити (рус. Любопытство/Любознательность), представляющего собой автономную химическую лабораторию в несколько раз больше и тяжелее предшественников. Аппарат должен будет за несколько месяцев пройти от 5 до 20 километров и провести полноценный анализ марсианских почв и компонентов атмосферы. Запуск Кьюриосити к Марсу состоялся 26 ноября 2011 года, мягкая посадка на поверхность Марса — 6 августа 2012. Предполагаемый срок службы на Марсе — 1 марсианский год (686 земных суток). Вместо традиционных для планетоходов солнечных батарей в качестве источника энергии будет использоваться радиоизотопный термоэлектрический генератор.
В рамках экспедиции Чандраян-2 планируется использование шестиколесного лунохода весом 58 кг, оснащённого солнечными батареями, для изучения района южного полюса Луны в течение одного года.
![1024px-Lunar_Electric_Rover_2008_desert_testing[1]](https://aboutspacejornal.net/wp-content/uploads/2016/02/1024px-Lunar_Electric_Rover_2008_desert_testing1.jpg)
Lunar Electric Rover — транспортный луноход размером с грузовик
Lunar Electric Rover — транспортный луноход размером с грузовик. Небольшой вездеход с 6 ведущими колёсными осями. Аппарат работает от аккумуляторов, позволяющих в условиях лунной гравитации и поверхности развивать ему скорость до 10 км/час. В герметичной кабине устроены места для двух астронавтов и небольшой отсек для грузов.
![1920px-ATHLETE_(robot)[1]](https://aboutspacejornal.net/wp-content/uploads/2016/02/1920px-ATHLETE_robot1.jpg)
Луноход ATHLETE в тестовой лаборатории JPL. Август 2008 года
![800px-Lunokhod-3_side[1]](https://aboutspacejornal.net/wp-content/uploads/2016/02/800px-Lunokhod-3_side1.jpg)
Луноход-3 в музее
Третий советский аппарат из серии Луноход планировалось доставить на Луну в 1977 году при помощи межпланетной станции Луна-25, но её запуск не состоялся. Впоследствии Луноход-3 так и не был отправлен на Луну. В настоящее время он находится в музее НПО имени Лавочкина.
![220px-Venus_Rover[1]](https://aboutspacejornal.net/wp-content/uploads/2016/02/220px-Venus_Rover1.jpg)

Космическая гонка во времена "холодной войны" подразделялась на множество этапов: освоение верхних слоев атмосферы и изучение влияния их факторов на живой организм, запуск искусственного спутника Земли, первые полеты человека в космос, лунная гонка. Долгое время Советскому Союзу удавалось удерживать первенство в этом соперничестве, но попытки изучения и освоения Луны оказались мероприятием совершенно иных масштабов.
И тем не менее наша страна включилась в лунную программу. Программа пилотируемых полетов к Луне экипажей советских космонавтов по секретному постановлению ЦК КПСС и Совета Министров СССР № 258 от 3 августа 1964 г. "О работах по исследованию Луны и космического пространства" 1 включала в себя два направления:
1) облет Луны человеком "на пилотируемом космическом корабле с возвращением и посадкой на Землю" 2 в 1966 - первом полугодии 1967 гг.;
2) высадка экипажа из космонавтов на Луну в 1967-1968 гг. также с последующим возвращением на Землю.
Но работа по лунной программе началась задолго до выхода этого постановления. В разработке автоматических аппаратов, "предназначенных для посадки на Луну и проведения широкого круга экспериментов по изучению Луны" 3 , под руководством Особого Конструкторского Бюро (ОКБ-1) активное участие принимало ОКБ-586, позже получившее название "Южное" (г. Днепропетровск, Украинская ССР). В рамках программы Е-6, предусматривавшей осуществление мягкой посадки автоматической станции на Луну, "Южное" запросило у ученых Академии наук СССР 4 материалы о характере рельефа Луны и строении ее поверхности в равнинных и горных районах.
В том же 1964 г. к решению вопроса об имитации лунного грунта (опять же, под руководством ОКБ-1) подключился Научно-исследовательский институт камня и силикатов Госстроя СССР 5 (г. Ереван, Армянская ССР), взяв на себя обязанности по подбору камня и созданию аналога лунного грунта на основе вулканических горных пород 6 . Но из-за недостатка на тот период (март 1964 г.) "ясности вопроса о природе поверхности Луны" 7 , Междуведомственный научно-технический совет по космическим исследованиям (МНТС по КИ) при АН СССР ограничил деятельность армянских ученых. Ученые и конструкторы оказались в некоем замкнутом круге: для создания автоматической станции необходимы были данные о рельефе места посадки, а чтобы получить данные об этом рельефе - требовалась мягкая посадка автоматической станции на Луну.
Срочно требуется лунодром!

В 1965 г. главный конструктор головного предприятия - ОКБ-1 - Сергей Павлович Королев перебросил работы по подготовке автоматических аппаратов с ОКБ-586 на ОКБ им. С.А. Лавочкина (г. Химки, Московская область), которым на тот момент руководил Георгий Николаевич Бабакин. И если ранее по программе Е-6 было совершено более десяти неудачных запусков, то именно благодаря команде Бабакина автоматическая станция "Луна-9" в феврале 1966 г. все же осуществила мягкую посадку на Луну и передала на Землю долгожданные панорамные снимки лунного рельефа. До этого ученые знали о поверхности Луны только то, что могли наблюдать с поверхности Земли "при помощи оптических, радиоастрономических и радиолокационных средств" 8 .
Теперь, когда у ученых в 1966 г. появились сведения о поверхности Луны, а к 1967 г. были окончательно сформированы группы космонавтов, проходивших подготовку по лунно-облетной и лунно-посадочной программам, имитатор лунной поверхности требовался особенно остро. В 1967 г. встал вопрос о поиске площадки для создания такового имитатора лунного рельефа - лунодрома.

Испытания ходовой части планетохода "Луноход-I" в наземных условиях, имитирующих лунный грунт, на лунодроме Центра дальней космической связи. Крым. 22 ноября 1970 г. Фото: ТАСС
Характеристики
В конце 1960-х годов для качественной подготовки к освоению Луны необходимо было как минимум два лунодрома: общесоюзный с функциями научно-исследовательского центра и тренировочный полигон-площадка на территории Центра подготовки космонавтов ВВС (ЦПК).
На базе полигона общесоюзного значения планировалось производить испытания систем взлета и посадки, средств перемещения по лунной поверхности, отработать технологию постройки лунных баз и обеспечить подготовку лунных экипажей космонавтов.
Чтобы определиться с местом, в котором можно было бы устроить столь глобальное начинание, требовалось понять основные характеристики, предъявляемые к лунодрому. Так, его территория должна была имитировать не только поверхность Луны, но и поверхность других планет, в первую очередь Венеры. Тогда ученые пытались работать на перспективу. Также они полагали, что 70 процентов Луны покрывали породы, схожие с земными базальтами, потому нужна была площадка с выходами на поверхность базальтовых пород. Это дало бы возможность провести ряд исследований: от испытаний установок по переработке пород лунной поверхности с целью извлечения из них воды или кислорода до возведения "лунных" зданий, дорог и даже взлетно-посадочных площадок.
Рельеф местности будущего лунодрома должен был максимально совпадать с предполагаемым местом посадки на Луне и местом строительства будущей лунной базы, что позволило бы сократить затраты и время на строительство. Важно также, чтоб лунодром располагался в местности со значительным преобладанием солнечных дней (не менее 250-270 дней в году) и с максимальными значениями солнечной радиации, близкими к значениям солнечной радиации в космосе и на Луне. Это позволило бы изучить световое давление "на долгоживущие спутники и космические межпланетные корабли" 10 . Минимальная сейсмичность - не более 1 балла - гарантировала бы сохранность сооружений 11 .
Структура

Кроме научных требований, важный фактор - транспортная и прочая инфраструктура вблизи будущей площадки - наличие линий электропередачи, крупных городов, относительно близкое расположение железнодорожных и автомобильных путей. Соблюдение этих условий существенно сократило бы расходы и упростило бы поиск трудовых ресурсов.
По своей структуре будущий лунодром должен был включать:
- собственно полигон, оборудованный барокамерами, установками облегчения веса, солнечными концентратами и прочим. В свою очередь, полигон планировалось разделить на два участка. Первый - с установкой "стационарного сооружения для уменьшения посадочного веса на 5/6 с целью отработки систем посадки и взлета, проверки прочностных характеристик, работоспособности систем амортизации и т.д." 12 (размером 100 на 200 метров). Второй - для комплексной проверки систем посадки и совершения горизонтальных маневров на лунной поверхности, с тремя зонами, разными по рельефу (плоская площадка, площадка с постоянной крутизной и площадка с переменной крутизной), общим размером не менее 1 на 1,5 километра;
- группу научно-исследовательских лабораторий;
- конструкторское бюро, одна часть конструкторов которого проводила бы разработку испытательного оборудования, а другая занималась "конструированием собственных средств для запуска" 13 ;
- опытное производство, способное изготавливать оборудование для нужд полигона и машины, механизмы для проведения испытаний;
- другие вспомогательные подразделения, в том числе криогенная станция по производству жидкого азота и гелия.
В структуру государственной промышленности будущий лунодром планировалось вписать как самостоятельное научно-исследовательское или опытно-конструкторское предприятие, подчиненное Министерству общей промышленности СССР.

Выбор места
По предъявленным требованиям наиболее благоприятными считались предгорные и нагорные участки Восточной или Среднеазиатской части СССР. Институт электроники Академии наук Узбекской ССР, который был своеобразной площадкой лунных инноваций, совместно с Институтом геологии и геофизики УзССР предложили для строительства два участка в Ташкентской области: возле поселка Невич Верхнечирчикского района и у поселка Аурахмат Орджоникидзевского района. Но второй вариант абсолютно не соответствовал необходимым требованиям и, скорее всего, просто выдвигался в качестве альтернативы.
Но немногим более привлекательным являлся и участок возле поселка Невич, который располагал площадками, сложенными из палеобазальта - породы, близкой по структуре к лунному грунту. Естественная величина этих площадок - 1 на 1,5 километра - была на первый взгляд приемлемой для предполагаемых лунных маневров. Но, чтобы получить к ним доступ, потребовалось бы снять слой почвы (от полуметра до 10 метров) и искусственно создать профиль лунной поверхности, обработав верхний слой пород "для создания шлакового покрытия нужной толщины" 14 . Картину недостатков дополняла повышенная сейсмичность территории, способная достигать 8 баллов, а это вело бы к дополнительным вложениям в строительство.
Тем не менее холмистая местность, 270 солнечных дней в году и удобная транспортная доступность: 6 км от автомагистрали "Ташкент - Ангрен", 50 км от железнодорожной станции Чигирик, 60-70 км до Ташкента и 6 км до линии Среднеазиатской энергетической системы, - "голосовали" за строительство лунодрома в этом месте.

Техническое задание
С 8 по 12 декабря 1967 г. в Ташкенте прошло совещание с солидным представительством, участники которого пришли к общему мнению о целесообразности строительства лунодрома в Невиче. Было понятно, что такой крупный проект, даже если и получит поддержку наверху, реализуется небыстро. А экипажи космонавтов уже проходили подготовку к будущим лунным экспедициям, и им крайне необходима была специально оборудованная "лунная" тренировочная площадка хотя бы размерами 100 на 100 метров. И ее начали готовить в ЦПК с 1966 года.
Техническим заданием предполагалось, что будущий малый лунодром должен представлять собой три небольших площадки с базальтовым грунтом, размерами 20 на 20 м каждая, а именно:
- плоская площадка, с отдельными небольшими камнями;
- наклонная площадка с крутизной до 15 градусов, с небольшими лунками и кратерами до 3 метров в диаметре и до 1 метра в глубину;
- площадка с переменной крутизной (до 20 градусов) и кратерами около 7 метров в диаметре и 2,5 метра в глубину 15 .
_t_310x206.jpg)
Для снижения земной гравитации и имитации гравитации лунной, полигон необходимо было обеспечить "специальными установками для уменьшения веса на 5/6" 16 . Даже к освещению на площадках предъявлялись повышенные требования 17 - оно должно было соответствовать освещению на поверхности Луны, для этого осветительные приборы собирались оборудовать специальными источниками света, со средней освещенностью поверхности в радиусе 5 метров - 10 000 люксов 18 .
При проведении тренировок на таком лунодроме космонавты без отрыва от остальных видов подготовки могли бы овладеть навыками по выходу и входу в корабль после прилунения, передвижению по лунной поверхности в спецснаряжении, по строительству лунных баз.
Но увы. На заседании 14 марта 1968 г. Комиссия по оснащению ЦПК тренажерными средствами под председательством генерал-майора авиации Леонида Ивановича Горегляда сочла строительство лунодрома с тремя площадками нецелесообразным. Для проведения тренировок в ЦПК комиссия оставила возможность сооружения лишь одной площадки, "имитирующей лунную поверхность, на которой можно было бы отрабатывать отдельные элементы действий космонавтов в лунной экспедиции" 19 .

Утрата интереса
Однако в итоге ни под Ташкентом, ни в Центре подготовки космонавтов никаких лунодромов так и не построили. Небольшой лунный полигон к сентябрю 1968 г. вместо предместий Ташкента оборудовали на базе Наземного измерительного пункта № 10 (НИП-10), или Симферопольского Центра дальней космической связи (ЦДКС) в пос. Школьном (недалеко от г. Симферополя) Крымской области Украинской ССР. Размерами он был с футбольное поле, 70 на 120 метров, "с рельефом, идентичным лунному: с углублениями, кратерами, разломами, россыпью камней различной величины" 20 .

Вместо изначально запланированных базальтовых горных пород, поверхность Крымского лунодрома покрыли ракушечником, и так как мощных выходов породы на территории НИПа не было, на нем отрабатывали только движения луноходов, а о строительстве прототипов лунных баз речи уже не шло. Сейсмичность региона также была далека от идеальной: вместо 1 балла она составляла от 5 до 8 баллов. Там же построили пункт управления луноходами (ПУЛ) для управления лунными космическими аппаратами в режиме реального времени.
В привычной для советской космонавтики манере ставка была сделана снова в пользу автоматических аппаратов, а не подготовки пилотируемого прилунения - лунодром использовался для отработки конструкции самоходных луноходов и навыков дистанционного управления ими у двух экипажей операторов 21 .
Аналогично, вместо небольшой площадки в ЦПК, малый лунодром с кратерами и трещинами расположился. в одном из ангаров ОКБ им. С.А. Лавочкина, в котором отрабатывались детали движения лунного транспорта 22 .
Большинство лунных проектов 23 остались нереализованными после высадки американцев на Луну в июле 1969 года: "Политбюро ЦК КПСС и лично сам Генеральный секретарь Л.И. Брежнев потеряли всякий интерес к лунной затее" 24 . В самом конце 1960-х годов космическая программа спешно перестроилась с лунной гонки на перспективу создания долговременных орбитальных станций.
* Исследование выполнено в рамках гранта президента РФ для государственной поддержки молодых российских ученых - кандидатов наук, проект МК-1745.2021.2.
1. Советский космос. Специальное издание к 50-летию полета Юрия Гагарина. М.: Вестник Архива Президента РФ, 2011. С. 599-602.
3. Российский государственный архив научно-технической документации (РГАНТД). Ф. 213. Оп. 6-6. Д. 58. Л. 60.
5. Далее - НИИ камня.
6. РГАНТД. Ф. 213. Оп. 6-6. Д. 58. Л. 118.
8. РГАНТД. Ф. 213. Оп. 6-6. Д. 59. Л. 71.
9. Beattie Donald A. Taking science to the Moon: lunar experiments and the Apollo Program. Baltimore and London: The Johns Hopkins University Press, 2001. P. 163.
10. РГАНТД. Ф. 1. Оп. 3-6. Д. 33. Л. 10.
13. РГАНТД. Ф. 1. Оп. 3-6. Д. 33. Л. 20.
15. РГАНТД. Ф. 1. Оп. 3-6. Д. 33. Л. 64-69.
16. РГАНТД. Ф. 1. Оп. 3-6. Д. 33. Л. 66.
18. Единица измерения освещенности.
19. РГАНТД. Ф. 1. Оп. 3-6. Д. 33. Л. 78.
20. Долинин А.И. Они видели восход Солнца на Луне // Красная звезда. 2018. N 22. С. 8.
22. Довгань В.Г. Лунная одиссея отечественной космонавтики. От "Мечты" к луноходам. Ростов-на-Дону: Издательство Южного федерального университета, 2015. С. 139.
23. Подр.: Славин С.Н. Тайны военной космонавтики. М.: Вече, 2013. С. 260-264.

Иллюстрация конструкции посадочного модуля космического корабля SpaceX Starship, который доставит первых астронавтов НАСА на поверхность Луны по программе Artemis. Предоставлено:SpaceX.
Общая сумма присужденного контракта с фиксированной ценой и поэтапным финансированием составляет 2,89 миллиарда долларов.
SpaceX будет тесно сотрудничать с экспертами NASA в течение базового периода разработки HLS, чтобы предоставить информацию о конструкции посадочного модуля и обеспечить его соответствие требованиям NASA к характеристикам и стандартам пилотируемых космических полетов. Ключевой принцип безопасных систем включает согласованные стандарты от областей инженерии, безопасности, здоровья и медицинских технических областей.
HLS Starship от SpaceX, предназначенный для посадки на Луну, опирается на испытанные компанией двигатели Raptor и летные традиции аппаратов Falcon и Dragon. Starship включает в себя просторную кабину и два шлюза для лунных выходов астронавтов. Конструкция Starship предназначена для развития до полностью многоразовой системы запуска и посадки, предназначенной для полетов на Луну, Марс и другие пункты назначения.
Награда HLS присуждается в соответствии с приложением H к объявлению агентства Next Space Technologies for Exploration Partnerships (NextSTEP-2).
Параллельно с получением награды "Приложения H" НАСА намеревается осуществить конкурсные закупки для устойчивых услуг по транспортировке на Луну экипажи, которые обеспечат доступ людей к поверхности Луны с использованием Gateway на регулярной основе, помимо первоначальной демонстрационной миссии с экипажем.
С помощью ракеты NASA Space Launch System, космического корабля Orion, HLS и лунной станции Gateway НАСА и его коммерческие и международные партнеры возвращаются на Луну за научными открытиями, экономическими выгодами и вдохновением для нового поколения. Работая со своими партнерами на протяжении всей программы Artemis, агентство будет доводить до совершенства технологии точной посадки и разрабатывать новые возможности мобильности, которые позволят исследовать новые регионы Луны. На первый взгляд, агентство предложило построить новую среду обитания и вездеходы, испытать новые энергосистемы и многое другое. Эти и другие инновации и достижения, сделанные в рамках программы Artemis, гарантируют, что НАСА и его партнеры будут готовы к следующему большому шагу пилотируемых полетов — исследованию Марса.
Читайте также: