
Star схема захода на посадку
Обновлено: 08.07.2024
Cогласно PANS-OPS различают пять отдельных участков (этапов) инструментального захода на посадку:
– Участок подхода (Arrival Route)
– Начальный участок (Initial Approach Segment)
– Промежуточный участок (Intermediate Approach Segment)
– Конечный этап (Final Approach Segment)
– Уход на второй круг (Missed Approach)
Кроме того, также рассматривается зона, предназначенная для полета в визуальных условиях по кругу на аэродроме.
Участки захода на посадку начинаются и заканчиваются в установленных контрольных точках. Однако при некоторых условиях определенные участки могут начинаться в указанных точках, где нет контрольных точек. Например, конечный участок точного захода на посадку может начинаться в точке, где абсолютная высота полета на промежуточном этапе захода на посадку пересекает номинальную глиссаду (точка конечного этапа захода на посадку).
Участок подхода (Arrival Route )
Участок подхода ( Arrival Route ) - полет на последнем участке маршрута до контрольной точки начального участка захода на посадку IAF ( Initial Approach Fix ). При необходимости публикуется на схемах STAR. На маршруте подхода применяются критерии безопасности пролета препятствий аналогичные критериям маршрутной структуры.
Начальный участок (Initial Approach Segment)
Начальный участок (Initial Approach Segment) - полет от точки IAF до контрольной точки промежуточного этапа захода на посадку IF ( Intermediate Approach Fix ). Этот и последующие этапы должны иметь контрольные точки. При полете на начальном этапе ВС находится вне маршрутной структуры и осуществляет маневр для выхода на промежуточный участок захода на посадку. Скорость и конфигурация ВС зависят от расстояния до аэродрома и потребного снижения. Зона начального этапа захода может иметь протяженность 15-30 морских миль (25-50 километров) и ширину не менее 10 морских миль (по 5 миль в каждую сторону от оси маршрута).
Обеспечивается безопасная высота пролета над препятствиями 1000 футов (300 метров). Высота полета на начальном участке - не менее высоты входа в глиссаду или начальной высоты выполнения схемы захода на посадку.
В случае отсутствия подходящей точки начального или промежуточного этапа захода на посадку, применяется обратная схема захода, схема "Ипподром" и так далее.
Промежуточный участок (Intermediate Approach Segment)
Промежуточный участок (Intermediate Approach Segment) - полет от точки IF до контрольной точки конечного этапа захода на посадку FAP ( Final Approach Fix - FAF, USA или Final Approach Point - FAP, ICAO ). На этом этапе производится корректировка конфигурации и скорости полета ВС для подготовки к конечному этапу захода на посадку. На схемах, где указана FAP (указывается ´ ), промежуточный участок начинается с того момента, когда ВС находится на линии пути приближения стандартного разворота, обратного разворота на посадочный курс или на конечном участке приближения схемы "Ипподром". Там, где не указана точка FAP, линия пути приближения представляет собой конечный участок захода на посадку, а промежуточный этап отсутствует.
Точка IF и весь промежуточный участок должны лежать на линии посадочного курса.
Конфигурация и размеры зоны промежуточного этапа зависят от применяемых посадочных устройств и схемы захода на посадку, но ее протяженность не должна быть менее 8,5 морских миль. Безопасная высота пролета препятствий на этом участке составляет 500 футов (150 метров).
Конечный этап (Final Approach Segment)
Конечный этап ( Final Approach Segment ) - полет от точки FAP до точки ухода на второй круг MAP ( Missed Approach Point ).
Этот этап делится на две стадии:
Дальняя прямая ( Long Final ) - участок полета до внешнего маркера.
Ближняя прямая (Short Final) - участок полета от внешнего маркера до точки MAP, после которой может быть выполнена посадка или начат уход на второй круг.
При выполнении точного захода на посадку точка FAP находится в точке входа в глиссаду, пролет которой производится, как правило, на относительных высотах от 1000 до 3000 футов или на расстоянии от 3 до 10 морских миль от порога ВПП.
При выполнении неточного захода точка FAP может располагаться над радионавигационным средством или может определяться по дальности от радионавигационного средства. В этом случае ВС пересекает FAP на указанной абсолютной (относительной) высоте или выше, а затем начинает снижение. На схемах в расчетных таблицах публикуется градиент снижения.
Уход на второй круг (Missed Approach)
Уход на второй круг (Missed Approach) - прерванный заход на посадку. Во время этапа ухода на второй круг при полете по схеме захода по приборам экипажу ВС необходимо изменить конфигурацию ВС, угловое пространственное положение и абсолютную высоту ВС. В силу этого, схема ухода на второй круг максимально упрощена и состоит из трех этапов - начальный, промежуточный и конечный.
Схема ухода на второй круг, предназначенная для предотвращения столкновения с препятствиями при выполнении маневра ухода на второй круг, предусматривается для каждой схемы захода на посадку по приборам. На схеме указываются точка, где начинается уход на второй круг, а также точка или абсолютная / относительная высота, где он заканчивается. Допускается, что уход на второй круг должен начинаться не ниже, чем DA/H* в схемах точного захода на посадку, или при применении схем неточного захода - в указанной точке, которая расположена не ниже, чем MDA/H*.
*MDA/H - минимальная абсолютная/относительная высота снижения укaзaннaя в схeмe нeтoчнoгo зaхoдa нa пoсaдку или схeмe зaхoдa нa пoсaдку пo кругу aбсoлютнaя или oтнoситeльнaя высoтa, нижe кoтoрoй снижeниe нe должно прoизвoдиться бeз необходимого визуaльнoгo контакта с ориентирами.
*DA/H - абсолютная/относительная высота принятия решения установленная абсолютная или относительная высота при точном заходе на посадку или заходе на посадку с вертикальным наведением, на которой должен быть начат прерванный заход на посадку (уход на второй круг) в случае, если не установлен необходимый визуальный контакт с ориентирами для продолжения захода на посадку.

VHF omnidirectional range в естественной среде обитания.
Михаил
Обсудим, как летит самолёт, на что ориентируется, что из полёта планируется на земле, а что нет. Например, если впереди гроза, то нужно же как-то обходить очаг. Флайтплан можно подать с воздуха прямо диспетчеру ОрВД. Мало кто про это знает, кто такое делал у нас в стране — единицы. На деле для этого есть другие процедуры.
Но для начала давайте совершим краткий исторический экскурс по опредёленным авиадисциплинам для лучшего понимания всей этой авиационной legacy, накопленной поколениями. Опять же, напомню вам — гражданская (да и в принципе вся) авиация — это одна из самых консервативных областей деятельности, что продиктовано в первую очередь фокусом на безопасности полётов (не путать с авиационной безопасностью — всякие САБ и иже с ними).
Времена пионеров авиации, к сожалению, давно прошли.
А вот здесь классный материал про то, как посадить самолёт.
Дисклеймер: я действующий пилот Airbus семейства 320. Соответственно, некоторые моменты, описываемые далее, будут привязаны именно к данному типу самолетов. И да, я не имею отношения к инженерно-авиационной службе и службе ОрВД (организации воздушного движения), поэтому уж простите возможные огрехи в описании матчасти.
1.1 Небольшой экскурс в географию
Как всем прекрасно известно, Земля в приближении похожа на слегка сплюснутый с полюсов шар (если говорить более сухим языком, то это эллипсоид вращения, но вообще, если уж говорить совсем правильно то земля — это геоид). Исходя из данного упрощенного предположения давным-давно была придумана геодезическая система координат, которая позволяет задать координаты произвольной точки на земной поверхности через долготу и широту места в градусах относительного нулевого меридиана.

Михаил
Но как обычно, legacy и здесь не подкачало и в зависимости от выбранных параметров эллипсоида вращения мы имеем небольшой зоопарк, состоящий из:
Весь мир сейчас использует систему WGS 84, авионика на всех современных самолетах рассчитана именно на внесение координат в данной системе. Повторюсь, что система координат ПЗ 90 почти не отличается от WGS 84 (скажем так, отличается некритично для самолётной навигации) и периодически встречается в Российских сборниках аэронавигационной информации (AIP, Aeronautical Information Publication). В конце 90х в нашем AIPе была каша из координат в системах СК 42, WGS 84 и ПЗ 90, что придавало особую пикантность при выполнении полета.
Теперь, когда мы умеем определять координаты точки А и точки Б на поверхности Земли, нам необходимо найти линию кратчайшего расстояние между ними. Для этого в навигации существуют два понятия:
-
(great circle distance) — кратчайшее расстояние между двумя точками на поверхности нашего эллипсоида вращения. По магнитному компасу выдержать полёт по ортодромии крайне сложно, т.к. магнитный курс будет постоянно изменяться. Раньше для подобных полётов использовалась специальная инерционная система, продольная ось которой выставлялась по направлению полёта. — кривая, пересекающая меридианы под постоянным углом. Расстояние по локсодромии всегда будет больше расстояния по ортодромии, но наличие постоянного угла по отношению к меридианам позволяло осуществлять навигацию по магнитному компасу/звездам как во времена судоходства, так во времена зарождения авиации и по сей день.
Интересные факты:
Одной из причин катастрофы Ту-134 под Петрозаводском в 2011 году стало то, что штурман в сложных метеоусловиях использовал GPS-навигатор, введя в него координаты торца полосы с аэронавигационного сборника в системе СК 42, что довольно прилично отличалось от координат в системе WGS 84. Результат к сожалению предсказуем.
Например, при трансатлантических полётах, часто задают вопрос: почему самолёт вылетая из Москвы в тот же Нью-Йорк летит через Англию, Гренландию и север Канады, ведь так же дольше? Краткий ответ: это потому, что самолёт летит по ортодромии. Развернутый ответ: самолёт летит по кратчайшему пути между точками. Проверить это, кстати, очень просто: взять глобус и приложить нитку от Москвы до Нью-Йорка, при этом кратчайший маршрут пройдёт именно по описанным выше местам. А то, что мы видим на экранах в салоне самолёта — это проекция эллипсоида вращения на плоскую поверхность, которая вызывает существенные искажения размеров около полюсов. Сравните, например, площади Гренландии и Австралии на такой карте и в Википедии.
1.2 Переходим непосредственно к воздушным трассам
Теперь, когда мы научились определять координаты произвольной точки на поверхности земного шара и строить между ними линии кратчайшего пути и линии, при полёте по которым угол между осью самолёта и меридианом будет постоянным, попробуем построить воздушную трассу. Но есть один нюанс — для того, чтобы самолёт мог лететь по этой трассе, всегда необходимо знать текущее местоположение самолёта с заданной точностью. По мере развития науки и техники были внедрены различные способы решения данной проблемы, по которым мы пробежимся чуть дальше.

Вторым этапом развития систем радионавигации стало изобретение VOR (VHF omnidirectional range) устанавливаемых обычно в комплекте с DME (Distance measuring equipment). VOR-маяк позволял определить с довольно высокой точностью радиал — угол между направлением на магнитный север, проходящим через VOR и направлением на самолёт. DME — определить дальность от самолёта до маяка. Теперь уже по одному VOR/DME, зная радиал и удаление, можно было более точно определить местоположение самолёта. Особенно бурный рост VOR’ов был в США в 1970-1980-х, когда почти вся территория США была покрыта сетью VOR’ов. При этом маяки устанавливались в отдельных точках воздушной трассы и всегда была возможность контролировать одновременно два радиала от одного VOR’a к другому. До сих пор, при полётах в США в нижнем воздушном пространстве актуален как никогда термин Victor airway — полёт по трассе, заданной двумя VOR’ами.
Дальнейшее появление GPS (или правильнее говорить GNSS — Global Navigation Satellite System), позволило определять местоположение самолёта независимо от наличия наземных радиосредств. Как результат — появление нового класса воздушных трасс, которые задавались произвольными координатами в пространстве. В авиации появился термин RNAV (Area NAVigation, она же зональная навигация), описывающий всё происходящее, требования к точности и т.д. и т.п.

При этом, самолёт может самостоятельно при помощи FMGC (Flight Management Guidance Computer) как отслеживать своё местоположение, так и осуществлять навигацию из точки А в точку Б по любой воздушной трассе с требуемой точностью.
Вывод: если говорить упрощённо, то воздушная трасса — это две произвольные точки на поверхности Земли, соединённые линией кратчайшего пути. При этом в данных точках могут находиться (но не обязаны) радиосредства (VOR/VOR-DME/NDB/NDB-DME).
Интересные факты:
1.3 Что такое SID/STAR и Flightplan
Данное повествование было бы неполным, если бы я не затронул еще несколько терминов, влияющих непосредственно на то, как самолёты покидают район аэродрома и каким образом попадают на него, пролетая до точки, из которой начинается конечный заход на посадку. В общем случае с точки зрения воздушной навигации полет самолёта выглядит следующим образом:
А теперь попробуем собрать всё это вместе на примере маршрута Шереметьево-Пулково:
UUEE 24C AR24E OBL1E B239 DB B160 OKULO R961 GENP1B 28L ULLI
- UUEE — ICAO код Шереметьево.
- 24C — полоса (центральная). — SID для полосы 24C в Шереметьево. — Transition.
- B239 — воздушная трасса, DB — NDB привод на трассе, B160 — другая воздушная трасса, OKULO — точка на трассе. — схема прибытия в аэропорту Санкт-Петербурга для ВПП 28L.
Интересные факты:
1.4 И на десерт — немного воздушного законодательства
Как вам теперь известно, самолёты в гражданской авиации летают от аэропорта к аэропорту не как хочется пилотам, а строго по определённым правилам. Правила эти изначально формировались каждой страной по отдельности, но с дальнейшим бурным развитием авиации стало ясно, что сопутствующий этому бардак растёт в геометрической прогрессии. Как результат — под эгидой ООН в 1944 году была создана Международная организация гражданской авиации (ICAO — International Civil Aviation Organization).

В первом собрании в Чикаго участвовали 54 государства, в результате чего была подписана “Чикагская Конвенция” — устав ICAO (так называемый ICAO Doc 7300). В данном документе были описаны основные принципы работы международной гражданской авиации, в частности, правила полётов над территорией стран-участниц, принцип национальной принадлежности воздушного судна и т.д. Кроме этого, было введено понятие международных стандартов и рекомендуемых практик (SARPs) — то, на чём сейчас базируется авиационное законодательство любой страны — члена ICAO. Кстати, СССР стал членом ICAO только в 1970 году, но это уже совсем другая история.
К чему я всё это рассказал: правила полётов во всем мире очень сильно гармонизированы, так как ICAO включает в себя почти все страны мира. Благодаря повсеместному использованию SARPs разрабатываются местные правила полётов, гармонизированные с нормами ICAO. Опять же, каждая страна — член ICAO должна обязательно публиковать AIP в открытом доступе, а пилоты и штурманы — использовать его в работе. На самом деле всё гораздо хитрее — такие коммерческие гиганты как Jeppesen или Lufthansa стали консолидировать информацию из AIP разных стран и предоставлять её авиакомпаниям в едином формате за отдельные деньги. В итоге, есть два программных продукта которые используются во всём мире: Jeppesen Flitedeck Pro и Lufthansa LIDO. При этом обе конторы так же выпустили свои приложения для EFB (Electronic Flight Bag) — айпадов/винпадов, сертифицированных для использования на борту самолёта и прибитых к форточкам в кабине самолёта. EFB как раз и используются в процессе всего полёта пилотами — там есть вся информация по маршруту, схемам аэропортов, рулению и т.д. и т.п.
Интересные факты:
Надеюсь, я достаточно запудрил вам голову базовыми понятиями. Ну что ж, теперь давайте перейдём к практике, без которой теория, как известно, мертва.
2.1 Что видят пилоты перед вылетом
Пилоты, придя в комнату для брифингов в аэропорту, получают комплект полётной документации.

Командир создает видимость работы в брифинге.
Состав данного пакета четко регламентирован (см. выше тему авиационного законодательства), но для нас самое интересное это:
В CFP/OFP всегда уже указан полный маршрут полёта, с SID/STAR/ENROUTE частью. Обычно сам маршрут — это RPL (Repetitive Flight Plan, повторяющийся план полёта), который повторяется каждый раз. Обычно штурманская группа авиакомпании прорабатывает несколько вариантов одного и того же маршрута и закладывает их в планировщик, и поэтому в зависимости, например, от струйных течений по эшелонам программа может выбрать сама наиболее оптимальный (экономичный, но исходя из заданных критериев) маршрут. Для понимания: струйные течения в верхней части атмосферы могут достигать 200 узлов (сам был свидетелем подобного и не раз). Типичная скорость струйного течения — около 100 узлов. Так же ветер может меняться по эшелонам, поэтому выбор оптимального (рекомендованного) эшелона тоже всегда за программой. Кроме этого в процессе расчёта OFP/CFP учитываются минимально безопасные высоты в случае отказа двигателя/разгерметизации, наличие запасных аэродромов по маршруту и много, много другой (бес)полезной информации.
В общем случае, пилоты не меняют маршрут, изначально заложенный в CFP/OFP, но возможны исключения:
- Если после анализа NOTAM выясняется, что опредёленные запасные аэродромы по пути следования закрыты или по каким-то причинам их невозможно использовать. Да, все ошибаются.
- Наличие мощных фронтальных гроз может послужить причиной для выбора другого маршрута. Например, при полёте из Москвы в Бургас полёт проходит строго на юг, далее через турков над территорией Чёрного моря. Обратно — прямо на север и через Беларусь обратно в Москву. Почему так? Чистая экономика (и, к сожалению, политика). Но, прилетев в Бургас, часто можно видеть, что дорога на север до самого Калининграда закрыта фронтальной грозой и оптимальным вариантом вернуться обратно будет через Чёрное море.
- Миллионы их. Очень много ограничений при полёте по северному Китаю за счет проблем, связанных с отсутствием запасных аэродромов и горной местностью. При этом, ограничения применяются как к техническому состоянию самолёта, так и к квалификации пилотов (привет, трасса B330).
В случае несогласия с маршрутом, обозначенном в CFP/OFP, вопрос почти всегда можно решить звонком в штурманскую службу, но надо понимать, что подача нового флайт-плана чревата задержками рейса. Поэтому задача командира — аргументированно донести (с ссылками на конкретные пункты РПП) свою позицию.
После получения нового/или согласия с текущим CFP/OFP задача командира определиться с количеством топлива, заправляемого в самолёт (а это — как минимум тема для отдельной статьи, как и принятие решения на вылет), подать данные по заправке/маршруту аэродромным службам и службе центровки и с гордым видом в окружении экипажа проследовать на борт для выполнения предполётных процедур.
Интересные факты:
- Все эти кодовые обозначения внутри NOTAM,METAR,TAF,CFP — это ещё одно жуткое legacy, тянущееся с лохматых годов в нашу жизнь. Да, пилоты должны их все знать и понимать.
- OFP/CFP на первый взгляд представляет из себя аналогичную мешанину из цифр и букв. Да, авиация крайне консервативна.
2.2 В процессе выполнения полёта

Заход на посадку и уход на второй круг — по статистике самые опасные этапы полёта.
Давайте разбираться, как это работает, и пользуясь моментом, посмотрим как устроена электронная система управления современным самолётом.
Но перед тем, как мы начнем, я вынужден обозначить эдакий дисклеймер: я действующий пилот Airbus семейства 320, который является самолетом 4-го поколения (отличительный признак которого — наличие технологии Fly-by-Wire). Соответственно, многие специфические системы и процедуры, описываемые в посте, будут привязаны к данному типу. На других типах (например Boeing 737 Classic/NG/MAX, которые являются самолетами предыдущего, 3-го поколения без технологии Fly-by-Wire) процедуры и логика построения и работы систем может значительно различаться. И да, я не имею отношения к инженерно-авиационной службе и службе ОрВД (организации воздушного движения), поэтому уж простите возможные огрехи в описании матчасти.
Краткий ликбез по 4 поколению самолетов (Fly-by-Wire)
Наверное, многие из вас наслышаны о технологии Fly-by-Wire (ЭДСУ или электродистанционная система управления по-нашему). Если кратко пробежаться по истории развития систем управления самолетом, то это выглядело примерно так:
- прямая механическая связь между штурвалом и аэродинамическими поверхностями (в общем случае это — элеронами, рулем направления, горизонтальным стабилизатором, триммерами и т.д.);
- появление гидроусилитей/бустеров/пружинных загружателей при наличии прямой механической связи;
- электродистанционное управление (Fly-by-Wire/ЭДСУ)

Здесь много интересной информации по теме Fly-by-Wire
В отличии от классической схемы, где прямая механическая связь (пусть даже через отдельные преобразователи) является правилом, в случае Fly-by-Wire данная связь отсутствует (сейчас опустим тонкости типа управления RUDDER’ом или HORIZONTAL STABILIZER’ом напрямую в режиме MECHANICAL BACKUP, это точно тема для отдельной статьи). Т.е. управляющее воздействие на сайдстик (Airbus) или штурвал (Boeing 777) оцифровывается и передается на FLIGHT COMPUTERS. Кстати, в Airbus их – аж целых 7: 2 ELAC’а (Elevator Aileron Computer), 3 SEC’а (Spoilers Elevator Computer), 2 FAC’а (Flight Augmentation Computer). Далее, исходя из закона управления (FLIGHT CONTROL LAW в терминологии Airbus) и множества других параметров полета, компьютеры выдают сигнал на отработку соответствующих гидроприводов, через которые управляющее воздействие передается аэродинамическим поверхностям.
К чему я это все рассказал: посадка на самолетах с Fly-by-Wire по технике выполнения очень похожа на то, что мы делаем на классических самолетах, но она имеет определенные особенности, о которых необходимо знать. Более подробно мы все это затронем ниже.
Интересные факты
Подготовка к посадке на эшелоне
Итак, мы летим на крейсерском эшелоне, при подлете к аэродрому назначения примерно за 200 с небольшим миль по VHF радиостанции можно услышать информацию ATIS (Automatic Terminal Information Service) аэродрома назначения. Принимаем погоду, далее с помощью специального программного обеспечения от Airbus, размещенного на бортовых iPad’ах (они же EFB — Electronic Flight Bag), проверяем погоду на предмет соответствия нашим landing performance, в частности соответствия расчетной посадочной дистанции располагаемой длине полосы с учетом текущих погодных условий и коэффициента сцепления на полосе и имеющихся отказов оборудования. Airbus 320 семейства имеет ограничения как по попутному ветру для взлета/посадки, так и по боковому. При этом боковая составляющая ветра с учетом порывов не должна превышать значения, внесенные в AFM (Aircraft Flight Manual, оно же РЛЭ – Руководство по летной эксплуатации) при сертификации самолета. Кроме этого, могут быть дополнительные ограничения в аэропорту назначения/запасным, которые находятся в NOTAM’ах (NOTice To AirMan) – эдакая пачка бумаги, которая обязательно выдается перед вылетом экипажу.
Кроме этого, погодные условия на аэродроме должны соответствовать минимуму самолета, экипажа и аэродрома. Если говорить простым языком, то минимум это минимально допустимые значения дальности видимости на полосе и высота облачности над ней (профессионалы, молчать!) Кому интересно – на том же SKYbrary есть очень много статей, рассказывающих про минимумы и их применение.
Сама подготовка включает в себя внесение в FMGS (Flight Management Guidance System, на Airbus их 2) через мини-клавиатуру с дисплеем MCDU (Multipurpose Control and Display Unit) схем прибытия (STAR, STandard ARrival) и самого захода (Approach, обычно это одна из инструментальных схем захода – например заход по ILS, Instrument Landing system), погоду в аэропорту назначения (давление QNH, температура, ветер) и минимума для соответствующего типа захода.

MCDU
При этом схема захода берется автоматически из базы FMGS (которая обновляется техническим составом раз в 24 дня на каждом самолете) и обязательно полностью проверяется на соответствие аэронавигационным сборникам. Наша авиакомпания использует сборники фирмы Jeppesen, которые также размещены в электронном виде на бортовых EFB:

iPad, прибитый к самолету

Или более жесткий вариант. Спасибо lx_photos
После того, как один из пилотов внес данную информацию, второй проводит проверку внесенных в FMGS данных (crosscheck – это одно из основных правил в авиации). Далее пилот, проводивший подготовку к посадке, зачитывает брифинг. Основная задача брифинга – рассказать об особенностях захода на посадку и ее выполнения, схемы руления после посадки, уход на второй круг. Особое внимание – при категорированных заходах по CAT II/CAT III (заходах с очень низкими минимумами, требующих выполнения специальных процедур) и действиям в случае отказа бортового оборудования в процессе захода или имеющихся отказах на борту самолета. NOTAM’ы со всеми ограничениями разбираются здесь же. После разбора всех имеющихся вопросов мы готовы к посадке, осталось дождаться подхода к точке начала снижения, которая также рассчитывается автоматически исходя из внесенных в FMGS данных.
Интересные факты
Снижение и заход на посадку
По своей сути весь процесс полета – это процесс управления энергией. Химическая энергия топлива преобразуется через тягу двигателей и подъемную силу в кинетическую энергию движения самолета и его потенциальную энергию по мере набора высоты, что в сумме дает общую энергию. При снижении – мы наблюдаем обратный процесс, когда вся накопленная энергия расходуется через аэродинамику и снижение высоты таким образом, чтобы получить посадочную скорость и заданную высоту к моменту пролета торца полосы. Исходя из вышесказанного и с учетом отдельных ограничений по скорости/высоте пролета отдельных точек на схеме STAR, ветра, FMGS вычисляет TOD (Top Of Descend, точка начала снижения).
Снижение на самолетах семейства Airbus может выполняться в двух режимах: MANAGED и SELECTED. В первом режиме самолет при помощи автопилота (AP, Autopilot) и автомата тяги (A/THR, Autothrust) сам пытается выдержать профиль снижения с учетом всех ограничений выбранной схемы прибытия, пилоты только контролируют то, что делает автоматика. Это не всегда удается, так как кроме профиля и скоростей, посчитанных FMGS, есть параметры, задаваемые диспетчером. Но в любом случае задание высот и перевод самолета на снижение – это ответственность PF. Для этого в самолете есть FCU (Flight Control Unit) – эдакая панель управления автопилотом самолета:

FCU с красивой подсветкой. Второй автопилот и автомат тяги включен
В режиме SELECTED – пилоты сами управляют автопилотом задавая режимы его работы. Типичные параметры – задача вертикальных и поступательных скоростей, так же довольно часто используется векторение (полет по курсу, заданному диспечером).

Грозовые очаги, как их видят пилоты на ND (Navigation display)
Интересные факты
Выполнение посадки
Еще небольшое лирическое отступление касательно систем захода на посадку: они бывают точные (в первую очередь это ILS, GLS — GBAS Landing System) – это заходы с вертикальным наведением и неточные (NDB – Non Directional Beacon, он же заход по приводам, VOR, RNAV и т.д.) – это заходы без такового наведения. Для каждого из типа захода на посадку есть т.н. GUIDANCE MODE — по сути режим работы FMGS, который обеспечивает заход самолета на посадку с учетом выбранного типа захода. При этом GUIDANCE MODE может обеспечивать точное наведение самолета по курсу и глиссаде (режимы LOG GS или FINAL APP) так и наведение только в одной плоскости (режимы LOC FPA или NAV FPA) или полностью ручное наведение самолета по заданному курсу/углу снижения (режим TRK FPA). Если суммировать сказанное, то точные заходы — более просты с точки зрения поддержки бортовой автоматикой, неточные — требуют дополнительного контроля как профиля, так и курса захода на посадку, что так же требует дополнительных усилий при заходе. Точные заходы позволяют осуществлять посадку при более низких минимумах, чем неточные.
В свою очередь, точные заходы делятся по так называемым категориям: CAT I, CAT II, CAT III A/B/C с соответствующим минимумом. На бывшей территории Советского Союза наличие ILS в аэропортах было раньше непозволительной роскошью, что не позволяло осуществлять заходы при более низких минимумах (чем точнее система захода – тем ниже минимум аэропорта). Но сейчас почти все большие аэропорты севернее Томска имеют ILS. Заход по приводам на старой технике это было еще то искусство полета… Для примера: если взять всю маршрутную нашей авиакомпании в России – только 22 аэропорта оборудованы системой ILS для захода по II категории и только 5 – для захода по IIIA.
Переводим самолет на снижение, зачитываем LANDING чеклист, получаем от диспетчера разрешение на выполнение посадки. При этом диспетчер обязательно сообщит текущий ветер, если он выходит за наши ограничения – то уходим на второй круг. Почти любое срабатывание сигнализации об отказах ниже 1000 футов над полосой в отсутствии визуального контакта с полосой – тоже уход на второй круг.
В 99% в нашей авиакомпании посадка выполняется в ручном режиме. Исключения: категорированные заходы при низких минимумах (CAT II/CAT III), где автоматический заход желателен/необходим. Так же все самолеты семейства Airbus 320 умеют выполнять процедуру Autoland с последующим rollout’ом (автоматическая посадка с последующей остановкой на полосе, с выдерживанием направления пробега используя курсовой маяк системы ILS). Для выполнения данной процедуры еще более жесткие ограничения по ветру, состоянию ВПП, работоспособности бортовых и наземных систем. Как это выглядит вживую:
Буквально три слова про уход на второй круг – в реальной жизни это бывает не так часто, но из-за редкости выполнения и скоротечности самого процесса требует повышенного внимания со стороны экипажа и особенно PM'a. Самое главное здесь – выдержать все ограничения по скоростям, высотам и тангажу при уходе с небольших высот – риск tailstrike высок как никогда. В зависимости от причины ухода на второй круг можно выполнить либо повторный заход, либо уйти на запасной аэродром.
Интересные факты
После посадки и до выключения на стоянке
А вот именно здесь, экипаж отдышавшись после выполнения посадки и освобождения полосы, выполнив необходимые процедуры с последующим AFTER LANDING чеклистом, переходит на частоту руления и узнает дальнейший маршрут движения по аэродрому. Обычно это длинная тирада с номерами рулежек, пересечений иногда с частотами для перехода и командами на ожидание в определенных местах. Главное здесь – все записать, повторить всю эту тираду диспетчеру и найти на схеме аэродрома, где находятся все эти рулежки.
Вот здесь на видео с 6 минуты видно, что из себя представляет схема руления в приложении Jeppesen Mobile Flight Deck:
Так же все рулежки, полосы и и.д. в аэропорту имеют специальную разметку, которая позволяет ориентироваться как в дневное, так и в ночное время. Самое главное здесь – контролировать маршрут руления по всем этим знакам и в случае малейших сомнений – переспрашивать диспетчера. Самолет заднего хода не имеет, поэтому если вы заблокируете рулежку или выедете на рабочую полосу без разрешения диспетчера (Runway Incrusion, что само по себе является серьёзным авиационным инцидентом) то вас просто не поймут.
Подъезжаем к гейту, здесь обычно нас встречает либо система типа SafeDock (моя любимая и наверное, самая распространенная), либо специально обученный человек в оранжевой/зеленой жилетке, который при помощи жезлов заводит нас на стоянку.

Процесс заруливания в исполнении системы SafeDock
Скажу сразу, используемые маршалом сигналы являются стандартными во всем мире и описаны в одном из документов ICAO. Таким образом мы (пилоты) можем понять, что от нас хотят с земли.
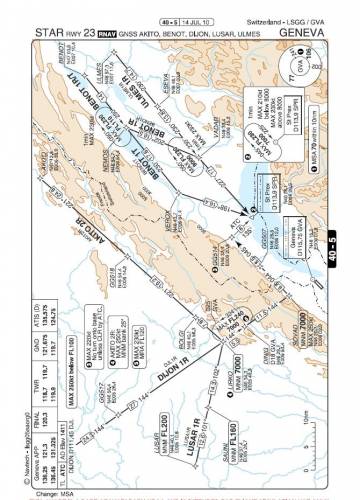
Прежде всего, мы видем карту рельефа местности с обозначением высот (цветом и числовыми значениями). Сверху мы видим название схемы с перечнем описанных здесь схем захода:
STAR rwy 23 RNAV GNSS AKITO, BENOT, DIJON, LUSAR, ULMES.
То есть это схемы прибытия на полосу 23. Тут появились ещё новые термины, которые довольно часто будут встречаться: RNAV и GNSS.
RNAV (Area Navigation) - Зональная навигация. Метод самолетовождения, позволяющий выполнять полет по любому избранному маршруту в пределах радиуса действия радионавигационных систем, или в пределах действия бортовых средств, или в пределах использования комбинации тех и других. Таким образом, маршруты зональной навигации - это такие маршруты, которые установлены для полета воздушных судов, оборудованных средствами зональной навигации (VOR, DME, GPS и другие).
GNSS - Global Navigation Satellite System. Глобальная навигационная спутниковая система. Как навигационный элемент систем управления воздушным движением CNS/АТМ включает в себя сочетания комбинаций следующих составляющих, размещенных на земле, спутниках и на борту ВС: GPS, ГЛОНАСС, бортовая система функционального дополнения (АВАS), спутниковая система функционального дополнения (SВАS), наземная система функционального дополнения (GВАS), бортовой приемник GNSS.
Далее мы видим дату схемы, номер страницы, название аэропорта.
К дополнительной информации относится таблица с частотами радиосвязи, превышение аэродрома AD Elev 1411 фута и эшелон перехода TL ATC. ATC (Air Traffic Control - управление воздушным движением), говорит нам о том, что эшелон перехода назначает диспетчер. Как правило, высота эшелона перехода выше высоты перехода на 1000-2000 футов. Поэтому если нет диспетчеров и иных указаний в схемах, я использую именно эту высоту. А поскольку, как мы уже выяснили, высота перехода в данном аэропорту составляет 7000 футов и на схемах мелькает высота 9000 (а не эшелон FL090), то эшелоном перехода возьмём FL090 (а не FL080).
Как и на предыдущей схеме мы видим круг зоны аэропорта с минимальными высотами:

Указания ограничения скорости максимум 250 узлов ниже FL100 (10000футов QNH):

Масштабная шкала (очень не рекомендуется использовать линейку для ориентирования по схемам, доверяйте только указанным числовым значениям):

И различные сноски, поясняющие особености прохождения помеченных точек пути:

На рисунке:
1) №3 максимальная скорость 220 узлов, третий разворот выполнять только по указанию УВД.
2) №4 AKITO 2R: максимальная скорость 250 узлов, минимальный крен разворота (BANK) 25*.
3) №5 максимальная скорость 230 узлов минимальныя высота вне маршрута FL120.
Ну и конечно же радионавигационные средства (здесь: ВОР маяки):

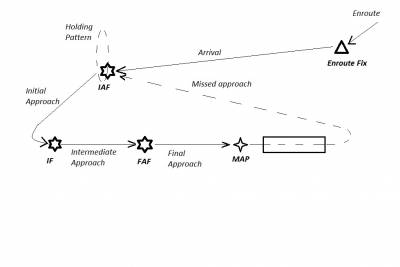
Что собой представляет общая схема захода?
Наш маршрут (Enroute) заканчивается последней точкой маршрута (Enroute Fix). от неё идёт участок прибытия (Arrival) до начальной точки инструментального захода IAF (Initial Approach Fix). С этой точки начинается начальный заход (Initial Approach), на этом участке экипаж начинает подготовку к посадке (сбавляет скорость, выпускает механизацию). Следующая точка - точка начала промежуточного захода IF (Intermediate approach Fix), с которой начинается участок промежуточного захода, на котором экипаж заканчивает подготовку самолёта к посадке (устанавливает посадочную скорость, выпускает механизацию крыла в посадочную конфигурацию, выпускает шасси и прочее). Здесь же происходит захват луча локалайзера (горизонтальная навигация). Далее самолёт проходит точку захвата луча глиссады FAF (Final Approach Fix) и начинает снижение по глиссаде (Final Approach). К 1000 футам по радиовысотомеру заход должен быть сбалансирован (по скорости, по точности следования траектории глиссады). И на высоте принятия решения капитан (MDA/MDH) принимает решения садиться или уходить на второй круг в точке ухода на второй круг MAP (Missed Approach Point). Схема ухода на второй круг так же фиксирована. Это может быть схема по "коробочке" :
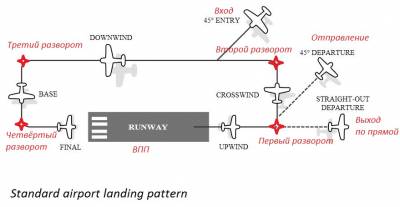
либо уход в зону ожидания (Holding Pattern):
Сразу отмечу, что есть два вида инструментальных заходов на посадку:
1. Точный (Precision Approach), в которов используется как горизонтальная навигация (LOCOLIZER), так и вертикальная (Glide Path - Луч Глиссады).
2. Не точный (Тщт-precision Approach), в котором используется только горизонтальная (lateral) навигация.
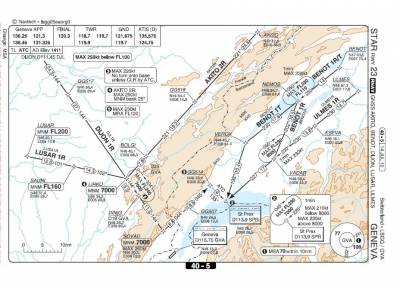
Эта схема захода начинается точкой ULMES и заканчивается ВОР маяком St Prex, который будет играть роль точки начала промежуточного захода.
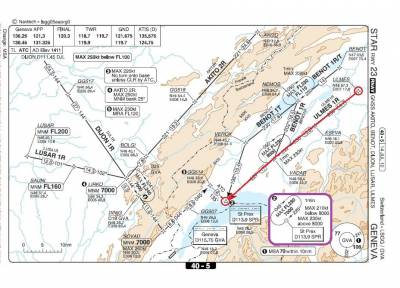
Сразу обратим внимание на сноску №2, касающуюся точки St Prex. С помощью этого ВОР маяка организована зона ожидания. Она используется для ухода на второй круг. Её inbound leg 225*, что совпадает с курсом полосы 23, времы прохождения одной leg 1 минута (для крупных лайнеров 2 минуты), ограничения по скорости: до 210 узлов ниже 8000 футов, 230 узлов - выше 8000 футов.
Однако, зона ожидания используется не только при уходе на второй круг. Здесь нас могут задержать в случае, если полоса занята в момент нашего появления. Иногда подобным образом обозначается стандартный разворот, если из данной точки нужно выйти строго указанным курсом, а мы подходим к нему со слушком большим углом, тогда нам придётся выполнить разворот Teadrop ("капля") или Parallel ("параллельный"). Подробнее рассмотрим в теме выполнения схем зон ожидания. Так же зону ожидания можно использовать для уменьшения скорости, если она "почему-то" оказалась слишком большой.
Над точкой ULMES нет никаких ограничений ни по скорости, ни по высоте, поэтому её мы проходим согласно наших расчётов.
Далее нам предстоит пройти 14,7 миль курсом 230* до точки ESEVA, которая тоже обозначена лишь координатами. Для неё так же нет никаких ограничений (кроме общего ограничения скорости 250 узлов ниже FL100).
Дальше проходим 13,8 миль прежним курсом 230* в направлении к точке VADAR. Вокруг неё так же организована зона ожидания и ест ограничения по высоте. Это интервал от 9000 футов до FL230.
После точки VADAR левым доворотом мы ложимся на курс 227* и двигаемся 17 миль до точки St Prex, для которой высоты ограничены интервалом 7000 - FL230 и где заканчивается схема нашего захода.
Не смотря на то, что схема разрешает высоту на точке St Prex вплоть до FL230, это не значит, что мы можем быть здесь на этой высоте, ведь сразу за St Prex будет точка входа в глиссаду, а она имеет свою фиксированную высоту. И чтобы узнать, на какой высоте нам нужно быть в этой точке, нам нужно открыть схему финального захода, которые мы сейчас и рассмотрим.
Небольшое примечание о том, как выбирать полосу для посадки. Для поддержания аэродинамических свойств самолёта, ему необходим достаточной силы набегающий воздушный поток, поэтому в этом плане встречный ветер даже приветствуется. Помимо того, встречный поток сносит нас в обратном направлении, в результате чего результирующая (путевая) скорость (ground speed), оказывается меньшей, при том, что аэродинамика самолёта остаётся прежней. Понятно, что чем медленнее будет двигаться самолёт относительно земли на посадке, тем меньшей длины полоса ему потребуется. Конечно на эшелоне встречный ветер будет играть совсем противоположную роль. Исходя из всего сказанного, мы будем выбирать полосу так, чтобы ветер максимально возможно дул нам навстречу. То есть разница курсов полосы и направления ветра (как известно оно подразумевает курс, ОТКУДА дует ветер) было как можно меньшим. Но при этом и прочие характеристики полосы (посадочная длина, "выносливость") должны соответствовать нашему типу ЛА. Это не касается тех аэропортов, где посадка осуществляется только в одном направлении (например, аэропорт Сочи).
Общий обзор.
не стану заострять внимание на уже пройденных нюансах. Буду Говорить о том, что еще не встречалось.
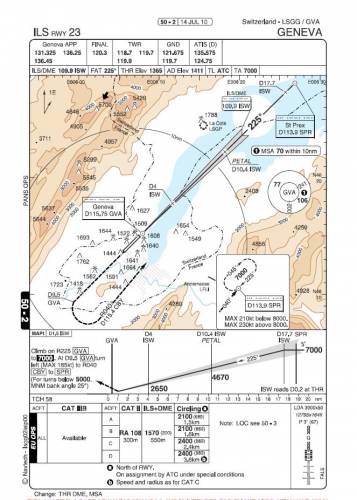
Итак, название схемы ILS rwy 23 - заход на полосу 23 по курсоглиссадной системе.
Далее мы видим частоты диспетчеров.
Ниже дополнительная информация:
ILS/DME 109,9 ISW - частота маяка, которую мы установим себе на навигационном радиоприёмнике, его буквенный код морзе. DME означает, что маяк имеет дальномерное оборудование, то есть мы будем видеть не только планку глиссады, но и удаление от маяка.
Там же FAT 225* - курс, по которому будет осуществляться заход ( в некоторых случаях он не совпадает с курсом полосы, приходится делать доворот на него перед касанием). Его мы установим себе на автопилоте. Фактически, это радиал маяка, как и в случае с ВОР маяками. THR Elev 1411 - превышение торца полосы. AD Elev 1411 - превышение аэропорта (некоторые аэропорты расположены на местности с разными высотами, превышение аэропорта - это его наивысшая точка).
Эшелон и высота перехода.
Далее идёт основной блок, который мы рассмотрим чуть позже.
Ниже - профиль финального захода и инструкция ухода на второй круг.
И в самом низу посадочные минимумы - высоты принятия решения (от уровня моря и по радиовысотомеру) в зависимости от типа и категории посадки.
И в правом нижнем углу - схемка огней, по которым осуществляется заход в ночное время или при низкой видимости, а также размеры полосы и угол наклона глиссады - тот угол, который позволяют выдерживать эти огни.
Общий обзор самой схемы.
тут мы снова видим карту с рельефом местности и государственной границей, круг радиусом 10 миль. Заметьте, внутри круга ограничение по высоте: минимальная высота 7000 футов (от уровня моря). Навигационные средства (вор маяки), полосу и собственно схему захода (сплошной чертой) и схему ухода на второй круг (пунктир).
Здесь же нам дана схема выполнения зоны ожидания, высота и ограничение скорости в этой зоне, её inbound leg (225*) и курс входа в зону 040* (такой вход подразумевает стандартный разворот "каплю").

В левом верхнем углу мы видим MARt D1,5 ISW, что означает, что точка принятия решения удалена от курсоглиссадного маяка (сокращенное имя ISW) на 1,5 мили. В правом нижнем углу нам говорят, что курсоглиссадный маяк читается на расстоянии 0,2 мили от торца полосы.
Внизу мы видим шкалу удаления от торца полосы в морских милях.
Угол наклона глиссады 3* - стандартный:

Сверху мы видим основные используемые точки и их удаления.
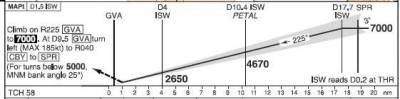
Итак, выполнение схемы посадки.
Мы должны подойти к ВОР маяку SPR на высоте 7000 футов (от уровня моря)и двигаться от него курсом 225*. На удалении 17,7 миль от ISW (маяк ILS, на который мы настроили навигационное радио) мы начинаем снижение по глиссаде. Далее даны контрольные точки:
PETAL - удаление 10,4 мили от ISW - здесь мы должны быть на высоте 4670 футов (от уровня моря).
Удаление 4 мили от ISW - здесь мы должны быть на высоте 2650 футов (от уровня моря).
Дальше мы пройдём высоту принятия решения (разберём чуть ниже) и в случае необходимости на расстоянии 1,5 миль от ISW уйдём на второй круг (пунктир).
Схема ухода на второй круг, а вернее, здесь нам предписана зона ожидания, если диспетчер не даст иных указаний:

В случае ухода на второй круг, в точке ухода на второй круг (1,5 мили от ISW), набирайте высоту 7000 футов, продолжая движение курсом 225* по маяку GVA (что соответствует курсу полосы, но на этот случай мы предварительно введем и частоту маяка GVA на втором навигационном приёмнике). На удалении 9,5 миль от GVA выполняем правый разворот с максимальной (приборной) скоростью 185 узлов и захватываем радиал 040* по ВОР маяку CBY (Chambery), частоту которого мы так же вводим в запасное окошко первого навигационного радиоприёмника. И двигаемся этим курсом 040* до маяка SPR.
Все развороты ниже высоты 5000 футов должны осуществляться с креном не менее 25*.
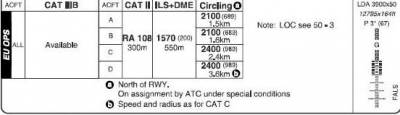
Как мы можем видеть, существует несколько разновидностей захода по данной схеме.
Заход категории III B по метеоминимумам (облачность 50 футов, видимость 50 метров) - это автоленд, и наш аэропорт сертифицирован для такого типа посадок. Одинаково для всех типов ЛА (по скорости захода), не имеет высоты принятия решения. "Пан или пропал".
Посадка категории II (облачность 100 футов, видимость 350 метров) - высота принятия решения 108 футов по радиовысотомеру (от уровня земли), видимость 300 метров для всех типов ЛА.
Посадка по ILS-DME (наш случай) - высота принятия решения (M)DA = 1570 футов от уровня моря или DH = 200 футов от уровня торца ВПП (DA=DH+превышение торца ВПП).
Circling to land или визуальный заход: по категориям:
A (Vref
Рассмотрю кратко только некоторые отличительные моменты.
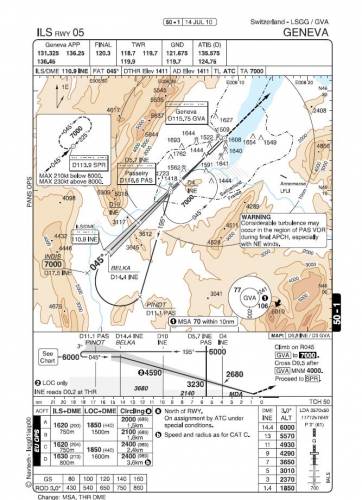
Для выполнения данного захода нам понадобятся два маяка:
1) основной, курсоглиссадный маяк (INE), его частоту 110,9 мы накручиваем на первом навигационном радиоприёмнике, не забывая включить индикацию расстояния (DME),
2) вспомогательный, вор маяк PAS (Passeiry), его частоту 116,6 накручиваем на втором навигационном радиоприёмнике.
Высоту принятия решения смотрим согласно категории нашего ЛА (по скорости) для соответствующего типа захода, сейчас это ILS+DME. Например, для категории С (B737) это 1620 футов от уровня моря или 204 фута по радиовысотомеру.
Итак, Мы должны пройти вор маяк PAS (jy расположен на расстоянии 5,7 миль от INE - курсоглиссадного маяка ILS) на высоте 6000 футов и двигаться курсом 195*до точки PINOT или удаления 11,1 мили от PAS, пройдя эту точку выполняем правый разворот и захватываем локалайзер ILS (INE) по радиалу 045* в точке BELKA (на удалении 14,4 мили от INE), эта точка так же является точкой захвата глиссадного луча и начала снижения. Дальше всё как и в предыдущей схеме, снижаемся по лучу, сверяем высоты на соответствующих удалениях. На высоте принятия решения - решаем садиться или уходить на второй круг в точке ухода (0,9 миль от INE или 3 мили от GVA).


И новое название захода LOC+DME.
Что же это значит?
Это тоже заход по курсоглиссадной системе (ILS), которая, как мы уже знаем, имеет две составляющие:
1) горизонтальная навигация (как любой ВОР маяк) - LOC (LOCALIZER)
2) вертикальная навигация (луч глиссады) - GP (Glide Path).
Существуют маяки, которые заводят самолёт на полосу только в горизонтальной плоскости, как ВОР маяк. Если в курсоглиссадном маяке отбросить функцию глиссады, например, если она вышла из строя или на борту это оборудование отсутствует или не работает, то мы получаем LOCALIZER. И по нему можно осуществить посадку, вот только за высотой придётся следить нам самим. Существуют заходы, где мы высоту контролируем по удалению (DME) и заходы, где вместо расстояние мы используем время. В данном случае нам даны расстояния и соответствующие им высоты:
Расстояние измеряется от маяка INE (это курсоглиссадный маяк\ILS ВПП 23), высоты относительно уровня моря. То есть, на удалении 14,4 мили (точка начала снижения) мы должны быть на высоте 6000 футов, на удалении 13 миль - 5570 миль и так далее следим вплоть до последнего значения 1,4 мили - 1850 футов. Следующей контрольной высотой будет высота принятия решения, с которой мы должны установить устойчивый визуальный контакт с полосой или уйти на второй круг.
Но при снижении для нас становится значимым ещё один показатель - вертикальная скорость (VS - vertical speed или ROD - rate of descent). Понятно, что вертикальная скорость находится в прямой зависимости от путевой скорости относительно земли (GS - ground speed): чем быстрее мы движемся относительно земли (НЕ приборная скорость. ), тем быстрее мы должны снижаться. Но так как скорость на финальном заходе должна быть постоянной, то ей будет соответствовать постоянная вертикальная скорость. Нам в помощь дана табличка зависимости вертикальной скорости (ROD) от путевой (GS) при данном угле наклона глиссады 3* (для другого угла значения будут другими!):
Таким образом, если мы движемся со скоростью (относительно земли) 140 узлов, то наша вертикальная скорость составит 750 футов-в-минуту. При скорости 150 узлов, вертикальная будет равна 805 футам-в-минуту.
Аналогичный заход имеется и для полосы 23, чему отведена отдельная схема:
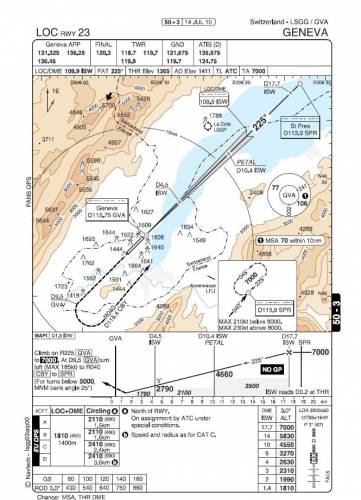
Обратите внимание на эту пометку:

NO GP = NO GLIDE PATH, то есть НЕТ ГЛИССАДНОГО ЛУЧА (пути). Рассчитывать вертикальный путь придётся самим, используя приведённые таблицы.
Читайте также: