
Уточненная методика захода на посадку по осп
Обновлено: 07.07.2024
\\\\TU-154:
Нет ничего проще.Система ОСП- оборудованная или "основная" система посадки по приводам. Пилот выдерживает направление по ненаправленным маркерам дальнего и ближнего привода .Расположены они в 4 и 1 км от торца ВПП. В кабине имеется световая и звуковая сигнализация прохода этих маяков. Вот собственно и все. Дальний желательно пройти на 200м, а ближний-60 метров. Вот и все.
Стрёмно, однако. :) Я понимаю, - приборов в кабине тьма, да и дублированны они.
Да и не один в кабине сидишь. Но в слепую, не видя полосы, мне кажется стрёмно
так сажать. :) Нет? Хотя, как я понимаю, при заходе по ОСП, минимум немного отодвигается.
Спасибо за ответ! :)
Разумеется минимум отодвигается. А насчет стремно. Не забывайте, есть ещё немало аэродромов где кроме ОСП ничего нету . А если лётчик натренирован в заходах по ОСП , то будьте спокойны - такой зайдет и сядет и в самых хреновых условиях .
А вообще Thomas Cook прав : - почитайте В.В.Ершова , очень замечательно у него про всё написано !
Дело в том, что системы захода используются в комплексе, система ОСП- это уже достаточно устаревший, хотя и надежный вариант, зачастую в отдаленных аэропортах, кроме приводов и нет ничего.
А в целом можно использовать и ИЛС , директора, заход по РСП(локатор) и ОСП.
Так что боятся нечего.
Директорный ты немного не правильно представляешь-так как это режим управления! Есть ручной, директорный и автоматический. А то что ты описал по планкам положения это заход по системе РМС-радиомаячная система.
Описанный способ захода *крест из двух стрелок* это не директорный, а заход по ПРМГ и планкам положения. Директорный это когда планки указывают КУДА и на СКОЛЬКО отклонять органы управления, а планки положения показывают отклонение от РСЗ.
А вот заход по ОСП действительно самый сложный и требует работы мысли. Получается в чистом виде заход по АРКи курсовой системе.
Молодежь. :))))
Лет 20 назад это был практически основной заход для аэродромов ВВС. РМС на многих аэродромах устанавливались только с одним курсом. Так и заходили с минимумом 100х1, 0 иногда и реально меньше. А про GPS только в фантастических книжках читали.
Нет ничего проще.Система ОСП- оборудованная или "основная" система посадки по приводам. Пилот выдерживает направление по ненаправленным маркерам дальнего и ближнего привода .Расположены они в 4 и 1 км от торца ВПП. В кабине имеется световая и звуковая сигнализация прохода этих маяков. Вот собственно и все. Дальний желательно пройти на 200м, а ближний-60 метров. Вот и все.
Расположение ДПРМ и БПРМ в 4 и 1 км от торца соответственно, это стандарт.
очень много аэродромов с нестандартным расположением приводов. Поэтому высоты прохода их нужно рассчитывать в зависимости от УНГ (угол наклона глиссады). Например на "Черешне" этот угол 4гр 12 мин если мне склероз не изменяет. Рассчитывается также высота по глиссаде через каждый километр. При УНГ 2гр40м (стандарт) это считается очень просто, дальность-пополам.Д-10 Н-500, Д-9 Н450, Д-8 Н-400, и.т.д. Световая и звуковая сигнализация при срабатываении указывает на проход привода, на ДПРМ 2 тире/сек, на БПРМ 3 точки/сек. или "рита" говорит "маркер". Система простая и надёжная, на Ту-16 применялась постоянно. Кто по ней научился, тому уже ничего не страшно. Зайдет в любом случае.
Главное чтоб АРК и курсовые правильно работали.
Уточненная методика захода на посадку по ОСП (рис. 34) применяется при отсутствии радиолокационного контроля на аэродроме посадки и в том случае, когда экипаж лишен возможности инструментально определять расстояние до ВПП при заходе на посадку.
Особенности захода при этом заключаются в следующем. После вывода самолета на предпосадочную прямую и своевременного полного выпуска закрылков в установившемся горизонтальном полете определить и запомнить режим работы двигателей при посадочной конфигурации самолета на скорости, равной скорости полета по глиссаде. Определив момент начала снижения, перевести самолет на снижение с вертикальной скоростью больше расчетной на 1,2 м/с.
Примечание. Во всех случаях захода по ОСП вертикальная скорость до пролета ДПРМ не должна превышать 7 м/с.
Когда высота полета будет на (30—20) м больше установленной для пролета ДПРМ и самолет к этому времени не пролетел ДПРМ, установить двигателям режим работы, соответствующий горизонтальному полету, и вывести самолет из снижения на высоте пролета ДПРМ. После пролета ДПРМ снижение продолжать с расчетной вертикальной скоростью до ВПР.
ПРЕДУПРЕЖДЕНИЕ. ВО ВСЕХ СЛУЧАЯХ ПОЛЕТА ВНЕ ВИДИМОСТИ НАЗЕМНЫХ ОРИЕНТИРОВ ЗАПРЕЩАЕТСЯ СНИЖЕНИЕ САМОЛЕТА ПРИ СИГНАЛАХ РАДИОВЫСОТОМЕРА О ЗАПАСЕ ВЫСОТЫ НАД ПРЕПЯТСТВИЕМ МЕНЕЕ 60 М. ПРИ СРАБАТЫВАНИИ СИГНАЛИЗАТОРА РАДИОВЫСОТОМЕРА НЕМЕДЛЕННО ПЕРЕВЕСТИ САМОЛЕТ В РЕЖИМ НАБОРА ВЫСОТЫ ДО ПРЕКРАЩЕНИЯ СИГНАЛОВ.
ЗАХОД НА ПОСАДКУ ПО КУРСОГЛИССАДНЫМ СИСТЕМАМ (КГС)
Курсоглиссадные системы (СП-50, СП-50М, СП-68, СП-70, ИЛС) обеспечивают экипаж непрерывной информацией о положении воздушного судна относительно линии курса и глиссады снижения.
Об отклонениях самолета от заданной траектории полета можно судить по положению планок курса и глиссады на указателе положения прибора НКП-4 (рис. 35, 36).
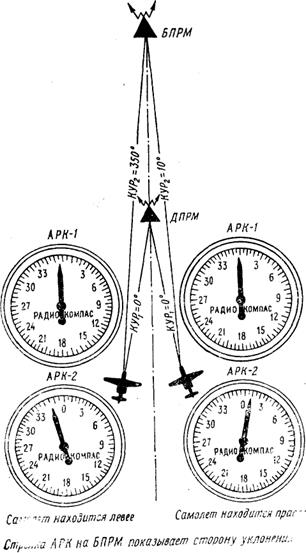
Начало четвертого разворота определять по предвычисленному магнитному пеленгу ДПРМ в зависимости от удаления от ВПП, скорости полета и боковой составляющей ветра на высоте круга.
Точность выхода из четвертого разворота на ось ВПП достигается двукратным контролем:
— первый — под углом 60° к оси ВПП с помощью АРК;
— второй — под углом 30° к оси ВПП с помощью планки курса указателя положения самолета относительно равносигнальной зоны. В этой точке должно наступить отшкаливание планки курса; если этого не произойдет, вывести самолет из крена и ждать ее отшкаливания. В случае преждевременного отшкаливания планки курса, что свидетельствует о позднем вводе в разворот, увеличить крен до 20°. Последнюю треть разворота выполнять при непрерывном сопоставлении показаний курса с движением планки указателя положения относительно равносигнальной зоны, которая в момент вывода должна занять нейтральное положение. Курс при этом должен быть равен посадочному с учетом угла сноса.
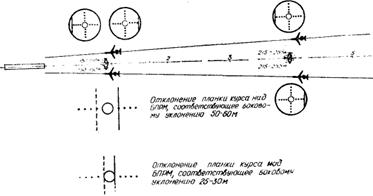
Согласно существующим нормативам точность выхода из четвертого разворота оценивается следующим образом (рис. 37).
В случае значительного отклонения от ЛЗП (курсовая планка отклонена до упора) развернуть самолет в сторону отклонения планки курса на величину угла выхода (20—30)°, который берется с учетом боковой составляющей ветра и при средних значениях угла сноса определяется по отклонению стрелки АРК от треугольного индекса на НКП-4 (КУРвых) в противоположную развороту сторону на величину угла выхода.
Выход в створ ВПП осуществлять методом полета с постоянным КУР [постепенно уменьшать угол выхода или осуществлять полет, с постоянным креном (2—3)°] и в дальнейшем корректировать доворот на посадочный курс по курсовой планке указателя положения.
В случае отклонения планки курса указателя положения в пределах шкалы прибора развернуть самолет в сторону ее отклонения настолько, чтобы планка курса приобрела заметное движение к центру прибора. При приближении планки к центру прибора посте-
пенно уменьшать упреждение с таким расчетом, чтобы планка замедлила движение к моменту подхода к черному кружку шкалы прибора и остановилась.
При небольших отклонениях самолета, что определяется по заметному движению планки курса от центра прибора, остановить движение планки, внеся поправку в курс (2—3)° в сторону возникающего движения планки. Для выполнения доворота на (2—3)° достаточно с помощью штурвала ввести самолет в крен (2—3)° и вывести из него.
Выдерживание глиссады обеспечивается сохранением постоянного, подобранного по вариометру для расчетной вертикальной скорости угла тангажа. Для балансировки самолета используется триммер руля высоты. Если самолет сбалансирован правильно (как по тангажу, так и по крену), значительно облегчается выдерживание заданной глиссады снижения. При полете в зоне курса и глиссады первостепенными приборами выдерживания режима снижения являются авиагоризонт и вариометр, а указатели скорости, высоты, курса, радиокомпаса и положения самолета на НКП-4— приборами контроля.
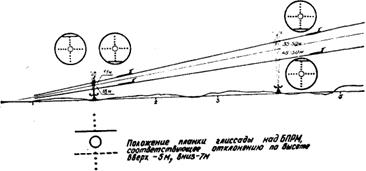
Согласно существующим нормативам точность пилотирования в зоне курса и глиссады оценивается следующим образом (рис. 38),
Пролет ДПРМ определять по сигналам маркерного приемника и по изменению КУР на 90°. При пролете контролировать соответствие высоты полета над ДПРМ установленной по схеме.
По мере приближения к ВПП равносигнальные зоны курса и глиссады сужаются, планки указателя положения самолета относительно равносигнальной зоны все более чувствительно реагируют на отклонения самолета, сказываются изменения направления и скорости ветра. Все" это потребует повышенного внимания, четких и соразмерных действий рулями для внесения поправок в курс величиной (2—3)° и для исправления вертикальной скорости в пределах ±0,5 м/с.

суббота, 18 июня 2016 г.
Заход на посадку по ОСП
На аэродромах, где отсутствует радиолокационный контроль за заходом на посадку, момент начала снижения рассчитывается экипажем. При этом имеют место ошибки в расчете, в основном связанные с неучетом изменения скорости и направления ветра в процессе построения предпосадочного маневра.
Для того чтобы избежать отклонения по высоте пролета дальнего привода и необходимости изменять вертикальную скорость по сравнению с расчетной после пролета его, а также добиться снижения самолета по установленной глиссаде после пролета ДПРМ с расчетной вертикальной скоростью (что способствует безопасной посадке), рекомендуется производить полет на предпосадочной прямой по уточненной методике захода на посадку. Она заключается в следующем.
1. Перед началом снижения рассчитать вертикальную скорость снижения Vв.расч., необходимую для снижения по расчетной глиссаде, в соответствии с установленным углом наклона глиссады.
2. По истечении времени tгпвыпустить закрылки на 35° и перевести самолет на снижение с вертикальной скоростью:
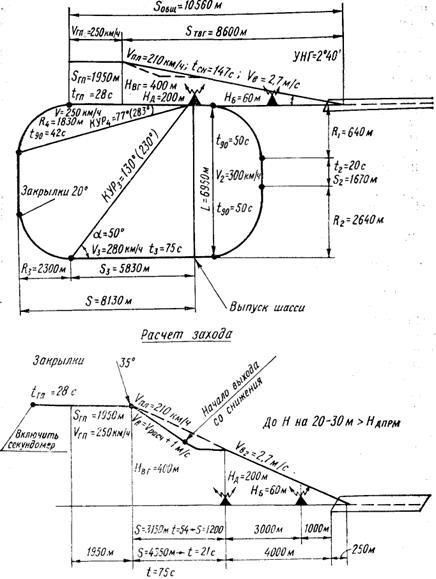
3. Когда высота полета будет на 20—30 м больше установленной для пролета над ДПРМ и если к этому времени не пройден ДПРМ, необходимо установить двигатели на режим работы, обеспечивающий сохранение поступательной скорости в горизонтальном полете, и перевести самолет в горизонтальный полет, выдерживая высоту пролета ДПРМ.
4. После пролета ДПРМ снижение необходимо выполнять по расчетной глиссаде до высоты принятия решения, не допуская отклонения вертикальной скорости от расчетной.
ПРЕДУПРЕЖДЕНИЕ. Во всех случаях полета вне видимости наземных ориентиров запрещается снижение при сигналах радиовысотомера о минимальном запасе высоты над препятствием. При срабатывании сигнализации немедленно перевести самолет в режим набора высоты до прекращения сигналов.
По достижении расчетного КУР4 (при заданном магнитном курсе) пилот производит ввод самолета в разворот, при этом взгляд сосредоточивается на авиагоризонте и вариометре;
— внимание уделяется авиагоризонту и вариометру для создания крена 15° и выполнения разворота в горизонтальной плоскости без скольжения;
— точность выхода из разворота в створ ВПП достигается контролем в двух точках (см. рис. 65): МК1 = ПК±60° и МК2 = ПК±30°, для чего в процессе выхода на указанные курсы взгляд переносится на показания КУР, сопоставляются их значения и вносится поправка в крен. В промежутке между указанными точками пилот должен следить за показаниями авиагоризонта, вариометра, скоростью, координацией. За 30° до вывода самолета на посадочный курс производится постоянное сопоставление значений курса и КУР. Вывод выполняется по авиагоризонту и КППМС на МКпос — (±УС);
Из сказанного следует, что на всех этапах захода на посадку основным прибором является авиагоризонт; точность пилотирования по приборам при заходе на посадку зависит от того, насколько правильно пилот выбирает приборы, необходимые для данного этапа полета, в установленной последовательности распределяет движение взгляда по ним и не распыляет внимания на другие приборы.

Заход по КГС в режиме СП является основным и применяется в случае захода на посадку в сложных метеоусловиях, а также для тренировки и проверки летного состава.
Курсоглиссадные системы (СП-50, СП-50М, СП-68, СП-70, ИЛС) обеспечивают экипаж непрерывной информацией о положении воздушного судна относительно линии курса и глиссады снижения.
Об отклонениях воздушного судна от заданной траектории полета можно судить по положению планок курса и глиссады на указателе положения прибора КППМС.
Точность захода на посадку по КГС в режиме СП зависит от умения пилота рационально распределять свое внимание на основные пилотажные (авиагоризонт, вариометр) и контролирующие приборы (указатели положения, скорости и др.), от умения быстро формировать образ полета и принимать правильные решения, от навыков в исправлении курса на 2—3° и вертикальной скорости в пределах 0,5—1 м/с.
Начало четвертого разворота определяется по предвычисленному магнитному пеленгу ДПРМ, в зависимости от удаления до ВПП, скорости полета и боковой составляющей ветра на высоте круга.
— под углом 30° к оси ВПП с помощью планки курса указателя положения самолета относительно равносигнальной зоны. В этой точке должно наступить отшкаливание планки курса; если этого не произойдет, вывести самолет из крена и ждать ее отшкаливания. В случае преждевременного отшкаливания планки курса, что свидетельствует о позднем вводе в разворот, увеличить крен до 20°. Последнюю треть разворота выполнять при непрерывном сопоставлении значений курса с движением планки указателя положения относительно равносигнальной зоны, которая в момент вывода должна занять нейтральное положение. Курс полета при этом должен быть равен посадочному с учетом угла сноса.
В случае значительного отклонения от ЛЗП (курсовая планка отклонена до упора) развернуть воздушное судно в сторону отклонения планки курса на величину угла выхода (20—30°), который берется с учетом боковой составляющей ветра.
Выход в створ ВПП осуществлять методом полета с постоянным КУР (постепенно уменьшать угол выхода или осуществлять полет с постоянным креном 2—3°) с последующей корректировкой доворота на посадочный курс по курсовой планке.
В случае отклонения планки курса в пределах шкалы прибора развернуть самолет в сторону ее отклонения настолько, чтобы планка курса приобрела заметное движение к центру прибора. При приближении планки к центру прибора постепенно уменьшать угол упреждения с таким расчетом, чтобы планка замедлила движение к моменту подхода к черному кружку шкалы прибора и остановилась.
При небольших отклонениях самолета, что определяется по заметному движению планки курса от центра прибора, остановить движение планки внесением поправки в курс 2—3° в сторону отклонения планки. Для выполнения доворота на 2—3° достаточно с помощью штурвала ввести самолет в крен 2—3° и вывести изнего.
Выдерживание глиссады обеспечивается сохранением постоянного, подобранного по вариометру для расчетной вертикальной скорости угла тангажа. Для балансировки самолета используется отклонение стабилизатора. Если самолет сбалансирован правильно (как по тангажу, так и по крену), значительно облегчается выдерживание заданной глиссады снижения. При полете в зоне курса и глиссады основными приборами выдерживания режима снижения являются авиагоризонт и вариометр, а указатели скорости, высоты, курса, радиокомпаса и положения воздушного судна на КППМС — приборами контроля.
Согласно существующим нормативам точность планирования в зоне курса и глиссады над ДПРМ и БПРМ оценивается следующим образом (рис. 72, 73).
Пролет ДПРМ определять по сигналам маркерного приемника и по изменению КУР на 90°. При пролете контролировать соответствие высоты полета над ДПРМ высоте, установленной по схеме захода на посадку.
По мере приближения к ВПП равносигнальные зоны курса и рассады сужаются, планки указателя положения самолета относительно равносигнальной зоны все более точно реагируют на отклонения самолета, сказываются изменения направления и скорости ветра. Все это требует от пилотов повышенного внимания, четких и соразмерных действий рулями для внесения в курс поправок величиной 2—3° и для исправления вертикальной скорости в пределах ± 0,5 м/с.
На аэродромах, оборудованных курсоглиссадными системами, основным режимом захода на посадку является директорный.
Пилотирование самолета при заходе в директорном режиме осуществляется вручную по директорным стрелкам.
Директорный прибор избавляет пилота от переработки и обобщения информации, получаемой от многих приборов, позволяет с большой точностью выдерживать глиссаду снижения и курс полета.
Характерно, что при заходе на посадку в директорном режиме основные пилотажные приборы (авиагоризонт и вариометр) превращаются в приборы контроля или вспомогательные, показания которых для пилотирующего становятся как бы второстепенными. Они служат только для взаимного контроля правильности показаний. Однако для обеспечения безопасности полета контроль показаний этих и других пилотажно-навигационных приборов должен быть активным и полноценным. Если один из пилотов осуществляет пилотирование по директорным стрелкам (активное управление), другой должен уделять повышенное внимание показаниям остальных приборов (контролирующее управление). Сличение и анализ показаний авиагоризонтов при этом обязательны.
Начало четвертого разворота при заходе в директорией режиме определяется по предвычисленному магнитному пеленгу ДПРМ в зависимости от удаления от ВПП, скорости полета и боковой составляющей ветра на высоте круга.
Убедиться, что вертикальная командная стрелка на приборе КПП отклонена в сторону разворота, и ввести самолет в крен. Вертикальная командная стрелка при этом приближается к центральному кружку прибора. Изменяя величину крена, удерживать командную стрелку в середине центрального кружка. Крен при этом не должен превышать 20°. Допускаются колебания командной стрелки в пределах центрального кружка прибора, но длительное отклонение ее от центра даже на небольшую величину повлечет за собой ошибку при выводе самолета в равносигнальную зону курса.
Во время четвертого разворота дополнительно контролировать точность выхода самолета в створ ВПП: под углом 60° к оси ВПП, сравнивая МПР и ЗМПУ, а под углом 30° — по отшкаливанию планки курса на КПП.
Если четвертый разворот выполняется не на расчетном удалении от начала ВПП, вывести самолет в створ ВПП по прибору КПП и по командам диспетчера.
На предпосадочной прямой до входа в глиссаду выпустить закрылки на 35° и фары (при необходимости). В момент прохождения планки глиссады по КПП через центр прибора при одновременном отклонении командной стрелки тангажа перевести самолет на снижение, удерживая стрелку тангажа в нейтральном положении.
Для обеспечения лучшего качества стабилизации самолета на глиссаде выдерживать заданную скорость с точностью ± 10 5км/ч.
При полете над ДПРМ определить возможность продолжения директорного захода на посадку, для чего необходимо убедиться в следующем:
— самолет отклонился от заданной траектории по курсу и глиссаде по прибору КПП не более чем на одну точку;
— крены самолета, необходимые для удержания командной стрелки в нулевом положении, не превышают 5—8° — при полете в равносигнальной зоне курса.
После пролета ДПРМ продолжать полет до ВПР, учитывая уменьшение линейной ширины зон курса и глиссады, удерживать командные стрелки в пределах центрального кружка небольшими плавными отклонениями рулей. При пролете БПРМ. определяется возможность продолжения директорного захода (высота пролета БПРМ соответствует установленной, отклонения по курсу в пределах белого кружка, по глиссаде — одна точка вниз по прибору КПП).
Началам построения маневра захода самолета на посадку является исходная точка снижения с высоты заданного эшелона над ДПРМ. Эшелоны подхода к аэропорту устанавливаются инструкцией по производству полетов для данного аэропорта. Снижение с заданного эшелона производится по указанию руководителя полетов.
Перевод шкалы давления высотомеров на давление аэродрома посадки экипаж производит по получении команды на снижение и заход на посадку от диспетчера КДП, (который указывает и условия захода на посадку— по схеме или с прямой.
Основными видами маневра снижения и завода самолета на посадку по системе ОСП являются:
а) посадка с прямой,
б) маневр от траверза ДПРМ,
в) маневр прямоугольного маршрута,
г) маневр стандартного разворота.
Посадка с прямойприменяется в тех случаях, когда управление подхода к аэродрому совпадает с направлением посадки или отличается на угол не более 45°. Воздушная обстановка в районе аэропорта при этом должна обеспечивать безопасное снижение самолета на маршруте до высоты визуального полета.
Посадка с прямой разрешается, если рельеф по маршруту на расстоянии 50 км от аэродрома позволяет снизить самолет на высоту 300—400м, а радиолокационное наземное оборудование диспетчерского контроля данного аэропорта позволяет непрерывно следить за провесом снижения самолета вплоть до выхода его на ПРМ с посадочным курсом.
При отсутствии в аэропорту контроля по радиолокатору, а также когда рельеф местности не позволяет безопасно снижать самолет по маршруту до высоты 300—400м, посадка самолета с прямой возможна только при условии обеспечения визуального подхода к аэропорту на расстоянии 10—15 км привысоте облаков не менее 400—500 м и видимости не менее 5 км.
Маневр от траверза ДПРМвыполняется при подходе самолета к аэропорту с курсом, обратным посадочному. Применяется при тех же условиях и с теми же ограничениями, что и заход с прямой.
Маневр заключается в том, что самолет с курсом, обратным (посадочному, на высоте 300—400 м подводится по командам наземного радиолокатора на траверз ДПРМ на удалении 6—8 км от оси ВПП. Далее маневр строится как и по прямоугольному маршруту.
Маневр методом прямоугольного маршрутаприменяется, когда невозможно произвести заход на посадку с прямой или от траверза ДПРМ, или когда самолет подлетает к аэропорту в сложных метеоусловиях на заданном эшелоне.
Порядок выполнения прямоугольного маршрута следующий (см. рис. 16):
1. После/получения от руководителя полетов разрешения на посадку и условий захода на посадку устанавливаются барометрические высотомеры по давлению на аэродроме и включается высотомер РВ-2 в диапазон больших высот ( диапазон 2)
Рис. 16, Схема захода самолета на посадку по прямоугольному маршруту (время штилевое).
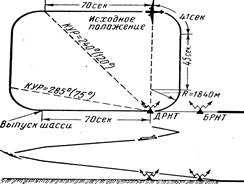
2. После выхода на ДПРМ самолет выводится на курс, перпендикулярный посадочному (ПМПУ±90°), и включается секундомер. По истечении 45 сек. (согласно схеме) полета выполняется второй разворот на курс, обратный посадочному (ПМПУ±180°).
3. Выполняется полет по прямоугольному маршруту на исходной высоте или со снижением с высоты нижнего эшелона до исходной высоты (300—400м), учитывая ветер на всех участках маршрута. Скорость полета должна выставлять 250 км/час по прибору, крен на разворотах l5°—20° и высота 300—400 м (высота для данного аэропорта).
4. В момент пролета траверза ДПРМ (при левом маршруте КУР = 270°, при правом маршруте КУР=90°) экипаж включает секундомер и ведет отсчет времени полета в течение 70 сек. (для штиля). На этом участке полета сверяются показания ГПК с МК. При наличии бокового ветра следует взять упреждение на величину угла сноса.
5. По истечении расчетного времени экипаж выполняет третий разворот на курс, перпендикулярный посадочному (ПМПУ±90°). Контрольный КУР начала третьего разворота — при левом маршруте 240°, при правом. 120°.
6. Четвертый разворот определяется по КУР равному при левом маршруте 285°, а при правом 75°. При наличии бокового ветра четвертый разворот следует начинать с поправкой КУР на ±3°—5° (в зависимости от боковой составляющей ветра). При левом маршруте, если ветер на ПМПУ слева, четвертый разворот следует начинать при КУР = 288°—290°, если ветер справа—при КУР = 282°—280°. При правом маршруте четвертый разворот следует начинать, если ветер на ПМПУ слева, при КУР = 78 0 —80°, если ветер на ПМПУ оправа, при КУР = 70°—73°.
7. После выполнения четвертого разворота командир корабля подает команду выпустить шасси, докладывает на СКП о выходе на посадочную прямую и после получения разрешения на посадку переключает радиовысотомер на диапазон малых высот.
9. После пролета ДПРМ продолжается полет со снижением (2—3 м/сек) на скорости 220 км/час по прибору. Направление полета выдерживается по показаниям АРК-5-П, настроенного на БПРМ, и при необходимости вводятся поправки в курс. Пролет ДПРМ определяется по звуковым и световым сигналам маркерного радиоприемника и по изменению КУР на 180°. О моменте пролета ДПРМ экипаж должен доложить руководителю полетов.
Сохраняя нормальный режим снижения, экипаж сосредоточивает свое внимание на показания авиагоризонта, вариометра, указателя скорости, барометрического и радиовысотомера, не допуская резких движений органами управления при исправлении курса.
11. После пролета БПРМ на высоте 50 ж и хорошей видимости старта (или огней светостарта ночью) командир корабля производит посадку визуально.
Маневр методом стандартного разворотаприменяется при тех же условиях, что и маневр прямоугольного маршрута. Форма маневра по стандартному развороту обусловливается, как правило, наличием препятствий в районе аэродрома (горы, радиомачты, запретные зоны и т. д.).
Маневр захода на посадку методом стандартного разворота выполняется в следующем порядке:
1. Получив разрешение на посадку, самолет выводится на ДПРМ с курсом, обратным посадочному. Выход на ДПРМ на заданной высоте докладывается диспетчеру КДП. Полет с курсом, обратным посадочному, экипаж выполняет на скорости 250 км/час с убранным шасси в горизонтальном полете или со снижением, если это предусмотрено схемой для данного аэродрома. При этом необходимо строго выдерживать установленную высоту горизонтального полета или время начала и окончания снижения. Для выполнения полета по заданной линии пути следует учитывать влияние ветра на полет. Поправку в курс на угол сноса определяет экипаж (или получает ее от руководителя полетов). При полете на этом участке уточняются: -показания ГПК в соответствии с магнитным курсом (ГПК автопилота устанавливается на МК = МКпос ± 180°) и работа приводных радиостанций
2. Начало стандартного разворота определяется временем полета от ДПРМ до стандартного разворота, предусмотренного инструкцией по заходу и расчету на посадку по системе ОСП для данного аэродрома. При этом должна вноситься поправка на скорость встречного или попутного ветра с целью сохранения постоянства времени, затрачиваемого для захода на посадку. Поправка на ветер вносится после следующего расчета: при продолжительности полета до стандартного разворота, равного 1,5 мин., это время при попутном ветре должно быть уменьшено на 3 сек., а при встречном — увеличено на 4 сек. на каждый метр в секунду скорости ветра
3. Стандартный разворот при безветрии и при встречном ветре на посадочном курсе выполняется в следующем порядке:
— разворот самолета на 80° вправо — при левом стандартном развороте или влево — при правом стандартном развороте;
— перекладывание самолета в обратный разворот;
— разворот самолета на 260°;
— вывод самолета из разворота по радиокомпасу на КУР = 0°;
— полет в течение 50 сек. до точки начала разворота.
В процессе стандартного разворота необходимо выдерживать заданную высоту полета, скорость 250 км/час поприбору и крен самолета 15°. Соблюдение высоты, скорости и крена обусловливает вывод самолета из стандартного разворота на ось позиционной линии (ПМПУ) в условиях безветрия или ветра, дующего в створе ВПП.
Основным видом контроля точности выхода самолета на позиционную линию в процессе выполнения стандартного разворота является сличение курсовых углов по ДПРМ с курсом полета самолета перед выходом на МПУ.
В процессе правильного разворота КУР отличается от 0° на меньшую величину, чем курс самолета от посадочного МПУ. Соотношение курсовых углов и курса самолета в трех контрольных точках показан на рис. 17. Исправление достигается уменьшением или увеличением (но не более чем до 20°) угла крена самолета. Окончательный контроль точности выхода самолета на ПМПУ осуществляется в момент, когда КУР = 0°. При этом курс самолета будет равен ПМПУ.
Если при КУР = 0° магнитный курс больше ПМПУ, самолет уклоняется влево, если магнитный курс меньше посадочного ПМПУ, самолет уклоняется вправо.
При наличии бокового ветра то отношению к позиционной линии системы ОСП необходимо во избежание бокового уклонения во время стандартного разворота вносить поправки в снос, в первой части стандартного разворота (при отвороте) на величину ±2 угла сноса.
Отворот на ветер выполняется не на 80°, а на 80°+2° угла сноса, отворот по ветру выполняется на угол 80°—2 угла сноса.

Рис. 17. Три точки контроля правильности выхода самолета на линию посадки.
Отсчет величины отворота с учетом поправки производить от магнитного курса.
Пример:Обратный ПМПУ системы ОСП равняется 25°, в полете выдерживается МК = 20°. Отворот вправо (при левом стандартном развороте) выполнен до МК = 95°, т. е. меньше на 10°. Вывод из стандартного разворота в данном случае произведен на КУР = 355° при МК = 210° с учетом сноса, равного —5°.
4. При полете самолета на участке от стандартного разворота до ДПРМ следует:
— доложить на СКП о выполнении стандартного разворота, получив разрешение на посадку, переключить РВ-2 на диапазон малых высот;
— одновременно с выпуском шасси перевести самолет на снижение с вертикальной скоростью 2—3 м/сек, или которая была рассчитана заранее), сохраняя скорость полета 220 км/час по прибору. Мощность двигателей при этом подбирается в соответствии с вертикальной скоростью снижения;
— при наличии бокового уклонения самолета от позиционной линии принять меры к выходу на нее. Если уклонение незначительное (угол ДП = 5°—8°) и нет бокового ветра, выход на линию пути с постоянным КУРвых = 350° — при уклонении влево и КУРвых=10° — при уклонении вправо. При боковом ветре и уклонении самолета в сторону, куда дует ветер, для выхода на позиционную линию КУРвых должен отличаться от 360° на двойную величину угла сноса.
Пример:На ПМПУ УС= +10°. Экипаж после вывода самолета из стандартного разворота определил уклонение самолета вправо. Для выхода на линию ПМПУ необходимо развернуть самолет влево до КУР = 20° и продолжать полет на радиостанцию, выдерживая постоянным КУР=20°. Когда величина МК самолета будет приближаться к величине, равной ПМПУ—20°, нужно развернуть самолет вправо на курс, равный ПМПУ—УС°. При уклонении самолета в сторону, откуда дует ветер, для выхода на линию пути следует выдерживать КУР = 0° и следить за изменением МК; когда МК будет приближаться к значению ПМПУ, нужно выполнить разворот на курс, равный ПМПУ (±УС), в этом случае самолет будет на линии пути с упреждением на величину угла сноса;
— при дальнейшем полете удерживать самолет на линии пути, сохраняя постоянным режим полета, скорость полета 220 км/час по прибору, вертикальная скорость 2—3 м/сек.
Если упреждение взято неправильно и самолет уклоняется вправо, надо уменьшить упреждение по КУР на 3—5°—при сносе влево или увеличить упреждение по КУР на 5—7° при сносе вправо.
В полете необходимо добиться такого положения, чтобы МК отличался от посадочного курса на такую величину, на какую КУР отличается от 360° (с обратным знаком).
Например, если КУР меньше 360° на 5°, МК должен быть больше посадочного курса на 5° (МПР должен быть равен посадочному МПУ).
На этом участке периодически проверять скорость и высоту;
— когда высота полета будет на 20—30 м больше установленной для пролета над ДПРМ, следует увеличить мощность двигателям и плавно перевести самолет в режим горизонтального полета, не допуская уменьшения скорости ниже 220 км/час по прибору, снижения и высоты ниже установленной по схеме для данного аэропорта. В полете при этом не допускать кренов, даже маленький крен уводит самолет с курса и затрудняет пилотирование самолета и удерживание его на линии ПМПУ;
— при приближении к ДПРМ, когда самолет летит несколько в стороне от линии ПМПУ, может наблюдаться резкое изменение МК при сохранении постоянного КУР. В таком случае следует удерживать постоянным подобранный МК; разворот для сохранения постоянным КУР вызывает уклонение самолета от ПМПУ и усложняет дальнейший полет до БПРМ.
Пролет ДПРМ определяется по звуковым и световым сигналам маркерного радиоприемника и изменению КУР на 180°.
О пролете ДПРМ необходимо доложить руководителю полетов.
Дальнейший полет от ДПРМ до БПРМ и выполнение посадки производятся так же, как это изложено при заходе на посадку при прямоугольном маршруте (от ДПРМ и до посадки).
Механическое удерживание земляных масс: Механическое удерживание земляных масс на склоне обеспечивают контрфорсными сооружениями различных конструкций.
Поперечные профили набережных и береговой полосы: На городских территориях берегоукрепление проектируют с учетом технических и экономических требований, но особое значение придают эстетическим.

Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого.

Организация стока поверхностных вод: Наибольшее количество влаги на земном шаре испаряется с поверхности морей и океанов (88‰).
Читайте также: