
Заход на посадку по пвп
Обновлено: 04.10.2024
Заход на посадку по приборам
Итак, новая тема. Достаньте из холодильника банку газировки или налейте себе чаю и устраивайтесь поудобнее: большую часть времени мы просто побеседуем об основных принципах полета по приборам. Никаких страшных секретов, явок, паролей и тайных знаков тут, собственно, нет, так что пугаться нечего. Этот курс расскажет вам, что такое полет по приборам, с чем его едят и когда применяют. Закончив курс, вы освоите навыки полета по приборам в том же объеме, в каком ими владеют профессионалы, пилотирующие огромные пассажирские самолеты.
На предыдущих занятиях мы уделили много внимания принципам визуального пилотирования самолета и ориентировке по линии горизонта. Пилоты называют это полет по ПВП (правилам визуального полета). Но как же быть, если не видно линию горизонта - скажем, если вы попали в зону облаков? Можно ли продолжать полет? Безусловно. Для этого и существуют ППП, или правила полета по приборам.
ППП позволяют управлять самолетом в условиях низкой видимости, используя приборы и навигационное оборудования (в частности, ВОР-индикатор), чтобы найти путь к аэропорту назначения. Эти приемы можно использовать даже при нулевой видимости - если, конечно, речь не идет о посадке. Для посадки возможность визуального наблюдения ВПП - обязательное условие. (Да-да, даже если у вас платиновая страховка или шлем с интегрированным каркасом безопасности, это не отменяет необходимости видеть взлетно-посадочную полосу.)
Чтобы летать по приборам, необходимо получить соответствующий допуск. Курсы полета по приборам доступны пилотам с сертификатом пилота-любителя. Они включают отработку маневрирования по приборам, изучение более сложных навыков навигации и пр. (А еще вы должны дать обещание, что не расскажете другим, как это интересно, иначе поток желающих превысит разумные рамки!) Главное в полете по приборам - это уметь читать приборы. Это вы уже умеете, если прошли три соответствующих занятия.
Итак, если вы не прогуливали занятия, то готовы покончить с чтением приборов и перейти на следующий уровень. В некоторых играх это означает, что нас ждет очередной жуткий огнедышащий монстр, которого надо срочно победить, чтобы заработать. Не сегодня. Спрячьте бластер в кобуру и глотните чаю, дорогой Мастер. Мы начинаем изучать пилотирование по приборам во всей его полноте.
Полет по приборам: общие сведения
В общих чертах полет по приборам происходит следующим образом: сначала пилот подает план полета по ППП в службу УВД. Это похоже на заказ столика в ресторане: персонал знает, что вы должны прийти, и оставляет свободное место. Служба УВД делает примерно то же самое. Когда все готово к отправлению, нужно связаться с вышкой УВД и сообщить, что вы подали план полета. Они отвечают: "Отлично, ваш план принят, взлет разрешен". Как видите, здесь нет ничего сложного и, в отличие от ресторана, не нужно платить чаевые.
Служба УВД с помощью радара ведет постоянное наблюдение как за вами, так и за всеми, кто производит в непосредственной близости от вас полет по ППП. Если самолеты начинают чрезмерно сближаться, диспетчер радиолокационного контроля разведет их с помощью устных команд. Нет-нет, не таких команд, как "Эй, берегись!", "Уходи, уходи же!" или "Боже ты мой!" Диспетчер просто направляет самолеты в разные стороны до устранения возможности столкновения.
При приближении к аэропорту назначения пилоты обычно достают из сумки тонкий листик бумаги, смахивающий на носовой платок (только не пытайтесь высморкаться в него, иначе пассажиры подумают, что за штурвалом Георг Замфир, виртуоз флейты Пана). Эта бумажка - схема захода на посадку по приборам. В ней подробно описано, как сойти с авиатрассы, зайти на посадку и посадить самолет, используя средства электронной навигации (как правило, систему ВОР). Для большинства крупных аэропортов существует одна или несколько схем захода по приборам. На рис. 1 можно увидеть пример такой схемы.
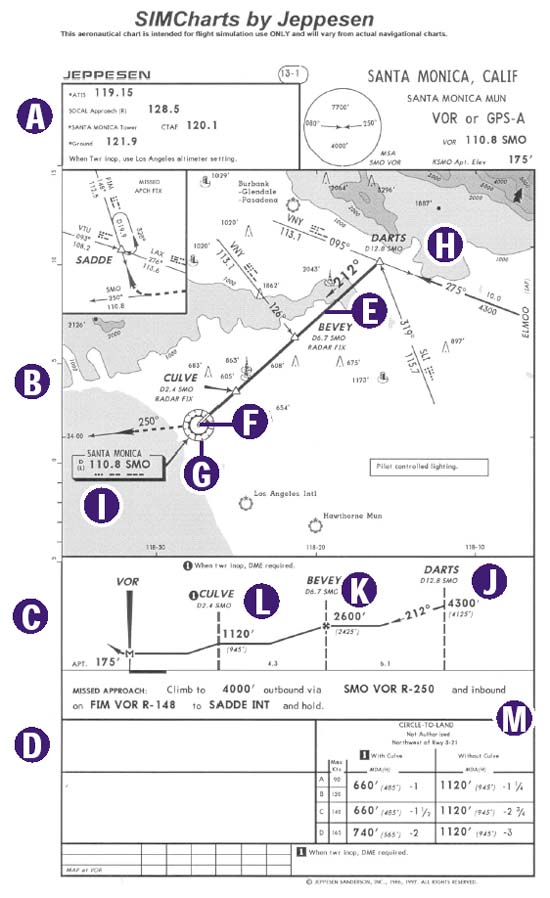 Рисунок 1 |
Схема захода на посадку по приборам
У всех схем захода на посадку по приборам есть несколько общих элементов. Во-первых, это список частот, на которых должно производиться общение с местными авиадиспетчерами (раздел A). Ниже располагается схема, где обозначено электронное навигационное оборудование, которое поможет вам подлететь к аэропорту (раздел B). Еще ниже расположен профиль со списком предварительных минимальных высот на подходе к аэропорту (раздел C). Наконец, в нижней части схемы расположен раздел минимумов (раздел D), в котором указана минимальная высота, до которой вы можете снизиться перед аэропортом.
На всех схемах захода на посадку указана точка, называемая точкой ухода на второй круг. Обычно она обозначена в профиле символом "M" (раздел C). В этой точке пилот должен отчетливо видеть ВПП, а если это невозможно, то чаще всего необходимо принять решение о совершении посадки в другом аэропорту с лучшими погодными условиями.
Уверен, я заразил вас этими идеями, и вам стало интересно узнать, как же происходит заход на посадку по приборам. Существует несколько различных вариантов, но для начала будет рассмотрен самый распространенный из них - заход по ВОР-маяку.
Заход на посадку с помощью ИЛС
Система ИЛС состоит из двух лучей: один следит за горизонтальным положением ЛА, второй - за вертикальным. Этот тип захода имеет серьезное преимущество перед заходом по ВОР (и другими заходами): система подведет вас к ВПП на удобной для посадки высоте, а не просто к точке над аэропортом, которая, возможно, будет находиться в сотнях футов над поверхностью земли. Понятно, что в такой ситуации сложнее перейти от захода по приборам непосредственно к приземлению. Курсовые маяки системы ИЛС более чувствительны, чем ВОР. Нет-нет, они не расплачутся, если вы прикрикнете на них в порыве гнева. Просто стрелка будет реагировать на отклонения от курса быстрее, чем это происходит при использовании ВОР. Вполне логично, что удерживать стрелку в центре экрана станет немного сложнее (не забывайте, что глиссадная планка тоже довольно чувствительна).
На рис. 2 изображена схема захода на посадку по ИЛС для ВПП 28R Международного Аэропорта Портленда (A). Частота курсового маяка составляет 111,3 МГц (B). После задания этой частоты для первого приемника навигационной системы (НАВ-1, верхний приемник) ВОР-индикатор будет отслеживать только один курс, точно выровненный на ВПП и называемый курсом по маяку. В случае Портленда он пролегает в направлении 279 градусов (C).
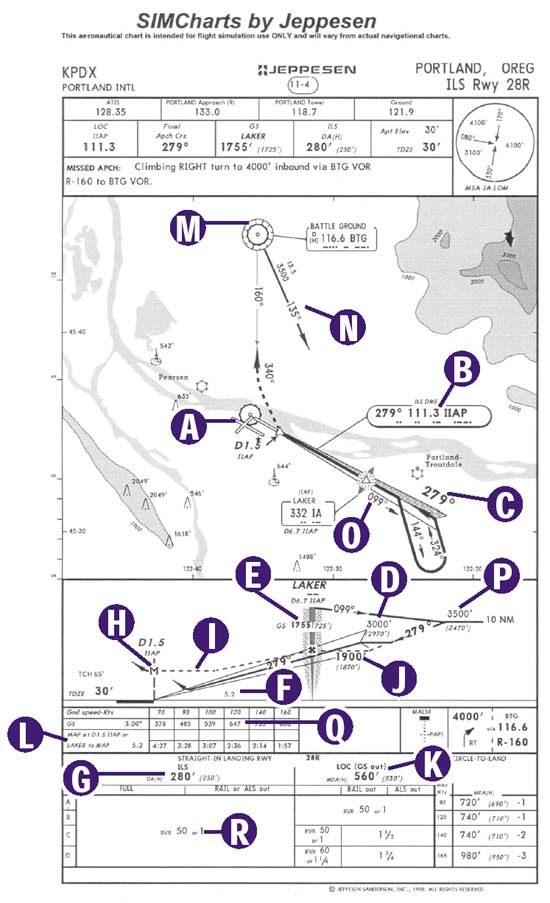 Рис. 2 |
После настройки частоты курсового маяка вы можете настроить переключатель пеленга ВОР на входной курс для контроля направления (при этом сам по себе переключатель пеленга не выполняет своей основной функции, так как ВОР-приемник настроен только на частоту маяка). Также после завершения настройки автоматически активируется специальная частота луча глиссады, которая не отображается на схеме захода на посадку.
Предположим, что вы находитесь на высоте 3000 футов (высота захвата луча глиссады) в позиции D. Вы летите по направлению 279 градусов и глиссадная планка на ВОР-индикаторе расположена выше середины. То есть вы находитесь ниже угла глиссады. По мере полета на высоте 3000 футов глиссадная планка будет постепенно приближаться к центральному положению и наконец займет его (то есть, вы захватите луч глиссады). После этого можно выполнять снижение с постоянной скоростью так, как это было описано выше.
При заходе по ИЛС, в отличие от захода по ВОР, вы будете, избегая встречи с препятствиями, следовать за электронным лучом к точке ухода на второй круг, вместо того чтобы выполнять ступенчатое снижение. (Надеюсь, что вы не опуститесь ниже угла глиссады и не начнете сшибать птиц с деревьев).
По мере снижения по лучу глиссады вы перелетите дальний привод, который в профиле обозначен в вертикальной зоне (E). После этого в кабине загорится синий предупредительный индикатор (и сработает предупредительный сигнал - как в микроволновке). Дальний привод указывает на то, что в процессе снижения вы пересекли важную точку и теперь находитесь на расстоянии 5,2 мили от ВПП (см. профиль, п. F).
По ИЛС можно снижаться до высоты принятия решения, которая располагается на высоте 280 футов (раздел минимумов, п. G). Это точка ухода на второй круг. Если вы, подойдя к ней, не можете разглядеть ВПП, необходимо совершить повторный заход. Я прекрасно знаю, что в начале ВПП находится символ "M" (H). Однако иногда пилоты принимают решение заходить на посадку без использования луча глиссады. Это необходимо, если в аэропорту нет глиссадного приемника или если он не работает (прибор чувствительный: может, его обидел кто и теперь он отказывается работать). В этой ситуации пунктирной линией (I) в профиле обозначается минимальная высота принятия решения (таким же образом, как и этапы ступенчатого снижения высоты при заходе по ВОР). Если бы мне разрешили заход по курсовым маякам, я бы пересек дальний привод на высоте 1900 футов (J), снизился до 560 футов (K) и полетел к точке ухода на второй круг. Она определяется по времени (исходя из путевой скорости от дальнего маркера) или дальномерной аппаратурой на курсовом маяке (L).
Теперь уже практически все в этой схеме должно быть вам знакомо. Представим, что вы находитесь над ВОР-маяком Бэттл Граунд (M), и служба УВД разрешает вам заход на посадку. Маршрут от Бэттл Граунд к заходу на посадку по ИЛС представляет собой 135-градусную радиальную линию (N). Настройте ВОР-индикатор на отслеживание исходящего курса по этой линии до перехвата курсового маяка. Чтобы не упустить момент перехвата курсового маяка, вы можете настроить нижнюю навигационную радиостанцию на ВОР-маяк Бэттл Граунд, а верхнюю - на прием сигнала курсового маяка. Когда стрелка курсового радиомаяка займет центральное положение, вы поймете, что поймали его сигнал. Кроме того, включится дисплей внешнего привода, так как курс 135 ведет вас к пересечению ЛЭЙКЕР, которое расположено на курсовом маяке.
От точки ЛЭЙКЕР вы летите в направлении 099 градусов (O), снижаетесь до 3500 футов (P) и совершаете разворот по установленным правилам в пределах 10 морских миль от указанной точки. Не забывайте об одном важном моменте, связанном с курсовыми радиомаяками: поскольку курсовой маяк представляет собой одиночный электронный луч, стрелка при следовании в противоположном ему направлении будет вести себя "наоборот". То есть, если вы летите в сторону от курсового маяка, вам необходимо двигаться в противоположную сторону для выравнивания стрелки. Это называется обратным считыванием. Таким образом при подготовке к выполнению разворота необходимо будет двигаться в направлении, противоположном движению стрелки, чтобы она держалась в центральном положении.
Когда вы закончите разворот и будете двигаться по входному курсу в направлении 279 градусов, стрелка вновь станет двигаться как обычно. После завершения разворота и выравнивания на входном курсе маяка можно спуститься до 3000 футов (высота захвата луча глиссады). После этого можно спускаться по лучу глиссады до высоты принятия решения. Подробнее о полетах с использованием ИЛС мы поговорим чуть позже.
Конечно же, многое осталось за рамками этого краткого обзора, однако основную информацию о заходе на посадку по приборам вы получили. Возможно, сейчас вы пребываете в состоянии легкого шока. Но это естественно - чтобы в полной мере овладеть этим навыком, необходимы тренировки. В то же время заход на посадку по приборам способен доставить истинное удовольствие. Он даже вызывает привыкание, так что не удивляйтесь, если в один прекрасный момент замечательный заход по приборам прервется из-за поломки компьютера.
Всего существует 11 видов захода: они подразделяются на визуальные, инструментальные, точные и неточные.
I. Визуальные:
1. заход визуальный (продолжение захода на посадку по приборам, когда часть схемы или вся схема захода на посадку по приборам не завершена и заход осуществляется при визуальном контакте с ВПП, и (или) с её ориентирами)
2. заход на посадку по ПВП (этап визуального полёта, выполняемый с соблюдением правил ПВП и при установленных минимумах ПВП)
Различие этих двух заходов в том, что ВЗП выполняется по установленной схеме, а ПВП – без схемы. Как правило ВЗП выполняется так: с эшелона перехода борт курсом на ближний привод снижается до минимальной безопасной высоты (МБВ), на этой высоте он входит в зону визуального маневрирования (ЗВМ) и оттуда уже летит визуально. При этом в поле зрения экипажа воздушного судна (ЭВС) ВПП должна быть постоянно после входа в ЗВМ. При заходе ВЗП и ПВП после связи с кругом воздушное судно передают сразу СТАРТУ, а не ПОСАДКЕ. О готовности к посадке при ВЗП борт должен доложить на 3-ем развороте (при довороте на посадочный, потому как 3-его как такового там нету). При ПВП же схема вообще отсутствует.
II. Инструментальные:
1) заход автоматический (заход на посадку по РМС в автоматическом режиме)
2) заход директорный (заход на посадку по РМС в директорном режиме)
3) заход по маякам (заход на посадку по РМС в режиме ПСП)
Три перечисленных захода объединяет то, что в основу положена курсоглиссадная система (ILS – Instrumental Landing System, что соответствует российской РМС – Радиомаячная система посадки).
При заходе по маякам мы знаем положение самолёта относительно посадочной прямой (левее-правее, ниже-выше). При этом стрелки на приборе просто показывают положение ВС. Зная где мы находимся, можем корректировать направление полёта, скорость снижения, чтобы оставаться на посадочной прямой.
При директорном заходе на приборе ещё есть планки, которые показывают, КУДА нужно лететь, чтобы оставаться на посадочной прямой. Причём директорные планки показывают, какой нужно дать крен и насколько изменить тангаж, чтобы оказаться на глиссаде. При полном штиле при заходе по маякам и директорам разницу по курсу мы не заметим, а вот при боковом ветре директорные планки сразу покажут с каким упреждением к курсу лететь. Разница между автоматическим заходом и директорным заключается в том, что по тем же самым директорным планкам самолёт ведёт не пилот, а автоматика. По последним документам ИКАО БПРМ и ДПРМ необязательны при выполнении захода по РМС (ILS) в любом режиме (автоматическом, директорном, ПСП).

4) заход по локатору (заход на посадку по РСП)
5) заход по локатору, контроль по приводным (заход на посадку по РСП+ОСП)
То же самое, что и заход по локатору с той только разницей, что ЭВС контролирует положение ВС по ДПРМ и БПРМ.
1) заход по приводным (заход на посадку по ОСП)
2) заход по приводным, контроль по обзорному (заход на посадку по ОСП с использованием ОРЛ-А)
Тоже самое, что заход по приводным с той только разницей, что диспетчер контролирует положение ВС по ОРЛ-А (обзорный радиолокатор аэродромный). Радиолокатор напоминает АСРЦ – диспетчер видит метку сверху, но не видит сбоку (не может контролировать снижение).
3) заход по ОПРС (заход на посадку по отдельной приводной радиостанции)
Заход на посадку осуществляется при помощи только одной отдельной приводной радиостанции БПРМ. Вы имеете точку ОПРС и курс, с которым вы должны к ней подойти. Использую эти данные, выходите на посадочный курс. Снижение выполняется почти также, как при заходе по приводным, за исключением того, что там нет ДПРМ. Т.е. от самой ТВГ производится снижение с расчётной вертикальной. Доклад о готовности к посадке аналогичен заходу по приводным.
Заход на посадку осуществляется при помощи использования угломерно-дальномерного оборудования. Положение ВС относительно ВПП определяется по ВОР с ДМЕ. Мы знаем направление на него и удаление от него. Кроме того, мы можем задать курс, с которым нам нужно к нему подойти. Используя всю эту информацию, выводим ВС на посадочную прямую.
Так получается по приборам летим, потому что если мы видим только окресности порта, то есть вниз видим вперед не видим, то естественного горизонта нет, мы его определяем по приборам. То есть полет по правилам ППП
А если не в окрестностях порта, видимость 1-2 км, вниз видим, горизонта не видим, это что, полет по ППП что ли ?
А если не в окрестностях порта, видимость 1-2 км, вниз видим, горизонта не видим, это что, полет по ППП что ли ?
В ФАП 136 написано:
66) полет визуальный - полет, когда пространственное положение воздушного судна и его ме-
стонахождение определяются экипажем визуально по естественному горизонту, земным ориентирам, а
также относительно других материальных объектов и сооружений;
67) полет по приборам - полет, когда пространственное положение воздушного судна, его место-
нахождение, а также положение относительно других материальных объектов и сооружений определя-
ются экипажем по приборам;
То есть если мы не мржем определить горизонт по естественному горизонту а видим только под собой, то этот полет приборный, я так понял.

То самое чувство, когда автоматика вся что есть - только на двигателе и gps-ка штатная со всеми системами.
На самоделке никого не пустят в плохую погоду, если вс не сертифицировано по полетам по ппп. Там куча всего должно быть на борту.
Всё равно это не ответ, почему и какими правилами диспетчера руководствуются. У нас вот в базовом аэропорту визуальный заход есть в паспорте аэродрома и называется ПВП для ВС кат А и В, как один из вариантов. А ПВП заход, когда просишь, это совсем не визуальный. Там надо коробочку подлиннее строить, как полагается.
А про circle to land лучше вообще не заикаться)) смысла нет, падать камнем с высоты 1500м. Лучше всю схему уж открутить.
В ФАП 136 написано:
66) полет визуальный - полет, когда пространственное положение воздушного судна и его ме-
стонахождение определяются экипажем визуально по естественному горизонту, земным ориентирам, а
также относительно других материальных объектов и сооружений;
67) полет по приборам - полет, когда пространственное положение воздушного судна, его место-
нахождение, а также положение относительно других материальных объектов и сооружений определя-
ются экипажем по приборам;
То есть если мы не мржем определить горизонт по естественному горизонту а видим только под собой, то этот полет приборный, я так понял.
Мысль интересная, в смысле юридических коллизий. могут прокуроры сцепиться в битве с адвокатом. Но это уж чисто поизголяться, практике не соответствует.
В ФАП-136 много чего написано, не работающего или не действительного.
В ФАП-128, регулирующего деятельность ГА, ничего про видимость горизонта нет. Главное - визуальный контакт, ground contact (при видимости водной или земной поверхности, вне облаков).
То самое чувство, когда автоматика вся что есть - только на двигателе и gps-ка штатная со всеми системами.
На самоделке никого не пустят в плохую погоду, если вс не сертифицировано по полетам по ппп. Там куча всего должно быть на борту.
Всё равно это не ответ, почему и какими правилами диспетчера руководствуются. У нас вот в базовом аэропорту визуальный заход есть в паспорте аэродрома и называется ПВП для ВС кат А и В, как один из вариантов. А ПВП заход, когда просишь, это совсем не визуальный. Там надо коробочку подлиннее строить, как полагается.
При circling не обязательно заход на противоположную полосу, это может быть к примеру заход на 10 полосу, а посадка на 06. В реальной жизни только в США приходилось сёклить. И при визуальном заходе и при сёклинге переход на ПВП не происходит. ППП остаётся в силе. ВЗП, circling и ПВП это три разные вещи. Хотя есть много общего.
При circling не обязательно заход на противоположную полосу, это может быть к примеру заход на 10 полосу, а посадка на 06. В реальной жизни только в США приходилось сёклить. И при визуальном заходе и при сёклинге переход на ПВП не происходит. ППП остаётся в силе. ВЗП, circling и ПВП это три разные вещи. Хотя есть много общего.
В 8168 вычитал
Заход на посадку по кругу- Дополнение к схеме захода на посадку по приборам, предусматривающее
выполнение визуального полета по кругу над аэродромом перед посадкой.
В 8168 вычитал
Заход на посадку по кругу- Дополнение к схеме захода на посадку по приборам, предусматривающее
выполнение визуального полета по кругу над аэродромом перед посадкой.
visual approach-это когда You are IFR flight but RW insight and You are responsible for terrain clearance and separation providing weather is VFR min.
circle-to-land это когда straight in approach (+/-30*) is not possible or desirable
Что там написали или неправильно перевели недоучки в горефапах это только им известно
---
Safe flights
При circling не обязательно заход на противоположную полосу, это может быть к примеру заход на 10 полосу, а посадка на 06. В реальной жизни только в США приходилось сёклить. И при визуальном заходе и при сёклинге переход на ПВП не происходит. ППП остаётся в силе. ВЗП, circling и ПВП это три разные вещи. Хотя есть много общего.
su27 14.01.2019 12:53
. при визуальном заходе . переход на ПВП не происходит. ППП остаётся в силе.
SD 13.01.2019 20:59
Для начала визуального захода необходимо доложить видимость впп ( или Cancel IFR). Это и есть переход с ппп на пвп.
avoka 14.01.2019 14:47
visual approach-это когда You are IFR flight but RW insight and You are responsible for terrain clearance and separation providing weather is VFR min.
Если RW insight and You are responsible for terrain clearance and separation providing - это и есть ПВП.
Если RW insight and You are responsible for terrain clearance and separation providing - это и есть ПВП.
Не совсем так. Точнее совсем не так. И повторюсь, правила не меняются. При ВЗП и ВМ полет продолжается по ППП.
Ещё бывает просишь визуальный с обратным курсом, куда ппп захода нет: вы подверждаете отмену полёта по ППП. Ну ок, ладно, да. Полоса под носом, погода миллион на миллион
Конкретно в этом случае скрыта одна тонкость:
Если на эту полосу нет схемы захода на посадку по приборам , то и траектории прерванного захода на посадку (ухода на второй круг) нет, которая является частью схемы захода на посадку.Выполнения визуального захода предусматривается при наличии визуального контакта с наземными ориентирами , в случае если этот контакт будет потерян (допустим ухудшились метеоусловия) то необходимо будет выполнить прерванный заход на посадку по установленной траектории которая является частью приборной схемы захода на посадку.
По-этому в вышеописаном случае диспетчер косвенно (ведь прямо нельзя:-)) принуждает к переходу на ПВП.
В дополнению к вышесказанному переход от одних правил к другим это не только изменение принципов пилотирования (капот-горизонт или стрелки), но ещё и юридическое изменение ответственности органа ОВД или ЭВС и правил и процедур которые может выполнять ЭВС.
Визуальный заход по определению полёт по ППП, переход на ПВП не требуется и если не ошибаюсь даже наличие визуальных метеоусловий не требуется (если не прав, то поправьте).
Всегда полезно знать мнение профессионала
(Пилот-инструктор а/к "Глобус" Денис Окань)
Необходимость захода Circle-to-land.
Данный заход широко применяется в зарубежных странах и с недавнего времени, по мере роста понимания у диспетчеров и пилотов, начинает применяться в России. Выполняется он тогда, когда по каким-либо соображениям невозможно применить иной вид захода на планируемую ВПП – например, заход по ИЛС или визуальный. Причины такой невозможности могут быть разными, но сводятся они по большому счету к одному:
- для данной ВПП отсутствует какая-либо разновидность инструментального захода на посадку, а ветер не позволяет использовать другую ВПП;
- применение данного захода дает возможность пилотам все-таки приземлиться, а не уйти на запасной;
- обязательным условием возможности выполнения Circling Approach является наличие возможности выполнения инструментального захода на посадку на другую ВПП.
Отличия от визуального захода на посадку
Многие пилоты путают Circling Approach и визуальный заход на посадку. Конечно, тут сложно не запутаться, т.к. в обоих случаях на определенном этапе пилот выполняет маневрирование на основе визуальных ориентиров. Легко замечаемым отличием Circling от Visual является то, что в первом случае всегда устанавливаются и публикуются эксплуатационные минимумы: минимальная высота снижения MDA(H) и видимость, а во втором лишь для некоторых аэродромов устанавливаются условия выполнения (видимость и нижний край облачности). При внешне схожих цифрах фундаментальное отличие MDA от НГО является то, что MDA считается по высоте препятствий в установленной зоне. Находясь в этой зоне на высоте не ниже MDA пилот гарантирует нормируемый запас высоты для пролета препятствий.
Еще одним отличием является то, что для возможности визуального маневрирования при заходе Circle-to-land пилот обязан установить визуальный контакт с ВПП. Для визуального захода на посадку достаточно визуального контакта с наземными ориентирами (см. определения). Конечно же, стоит отметить, что при наличии соответствующих погодных условий, любой инструментальный заход, как и маневр Circling, могут превратиться (с разрешения ATC) в визуальный, и при этом пилот может строить заход исходя из текущих соображений о препятствиях, то есть, не соблюдать первоначальную схему захода.
Общие правила выполнения
В общих чертах Circling Approach предусматривает следующий порядок:
1. Снижение до MDA по установленной схеме инструментального захода на посадку (либо полет на радионавигационное средство по опубликованной траектории).
2. Установку визуального контакта с ВПП
3. Выполнение маневра при постоянном визуальном контакте с ВПП.
4. При пересечении профиля финального снижения – снижение ниже MDA. Следует отметить, что данное пересечение может наступить и до точки финального разворота в сторону ВПП, при условии, что:
a) Установлен визуальный контакт с препятствиями и обеспечивается возможность его постоянного поддерживания;
b) Установлен визуальный контакт с торцом ВПП посадки;
c) Обеспечивается необходимое расстояние до препятствий, и самолет находится в посадочном положении.

5.1. ПРАВИЛА ВИЗУАЛЬНЫХ ПОЛЕТОВ
5.1.1. Правила визуальных полетов (ПВП) предусматривают выдерживание установленных интервалов между воздушными судами, а также между воздушными судами и другими материальными объектами в воздухе и на земной (водной) поверхности путем визуального наблюдения экипажами воздушных судов за воздушной обстановкой и кратковременного изменения режима полета.
Полеты по ПВП выполняются с максимальной осмотрительностью всего экипажа воздушного судна.
5.1.2. Полеты по ПВП выполняются:
- на минимальном расстоянии от облаков по горизонту - 1500 м;
- на высоте не менее чем на 300 м выше верхней границы облаков;
- на высоте не менее чем на 50 м ниже нижней границы облаков в равнинной и холмистой местности и не менее чем на 100 м - в горной местности;
- при видимости не менее 8 км на высотах более 3000 м и не менее 5 км на высотах менее 3000 м.
5.1.3. При встрече воздушных судов на пересекающихся курсах на одном и том же эшелоне (высоте) командир воздушного судна, заметивший другое воздушное судно справа от себя, должен увеличить высоту полета, а командир воздушного судна, заметивший другое воздушное судно слева от себя, уменьшить высоту полета таким образом, чтобы разность высот обеспечивала их безопасное расхождение. Если изменить высоту невозможно (облачность, полет на минимальной высоте и др.), командиры обязаны отвернуть суда для обеспечения их безопасного расхождения. В случае непреднамеренного сближения на встречных курсах необходимо отвернуть свое воздушное судно вправо для расхождения их левыми бортами. Командиры воздушных судов при выполнении маневра расхождения обязаны не терять друг друга из вида.
5.1.4. Обгон впереди летящего воздушного судна на одной высоте выполняется справа с интервалом не менее 500 м. При выполнении полетов по кругу обгонять однотипные воздушные суда ЗАПРЕЩАЕТСЯ.
С разрешения руководителя полетов при надежном визуальном или радиолокационном контроле более скоростные воздушные суда могут обгонять менее скоростные на участке от второго до третьего разворота с внешней стороны круга и с интервалом не менее 500 м.
5.1.5. Обход наземных препятствий, наблюдаемых впереди по курсу воздушного судна и превышающих высоту его полета, производится, как правило, справа от препятствий на удалении не менее 500 м.
5.1.6. При ухудшении метеоусловий до значений, не соответствующих требованиям для полетов по ПВП, командир воздушного судна обязан:
- возвратиться на аэродром вылета или выполнить посадку на ближайшем запасном аэродроме;
- перейти на полет по правилам полетов по приборам (ППП), если цель выполняемого задания на полет, уровень подготовки командира, оснащенность воздушной трассы (местной воздушной линии) и (или) возможности навигационного и пилотажного оборудования воздушного судна не препятствуют этому, а командир воздушного судна допущен к полетам по ППП.
- Командиру вертолета, кроме того, разрешается произвести посадку на площадку, подобранную с воздуха. Взлет с этой площадки разрешается при фактической погоде, соответствующей минимуму командира вертолета. О своих действиях командир вертолета обязан информировать орган ОВД (управления полетами).
При переходе на полет по ППП командир воздушного судна обязан согласовать свои действия и эшелон (высоту) с органом ОВД (управления полетами), который обязан обеспечить установленные интервалы между воздушными судами, согласовать (при необходимости) освобождение нижнего безопасного эшелона, а также условия входа воздушного судна в смежный район ЕС ОрВД.
5.1.7. При внезапном попадании воздушного судна в условия ниже минимума, установленного для полетов по ПВП, снижение ниже приборной безопасной высоты в целях перехода на визуальный полет ЗАПРЕЩАЕТСЯ. В этом случае командир обязан перейти на пилотирование по приборам, развернуться и, выполняя дальнейший полет по ПВП, возвратиться на аэродром вылета или ближайший аэродром. При невозможности перейти на визуальный полет после разворота, командир обязан приступить к набору нижнего безопасного эшелона и согласовать свои дальнейшие действия с органом ОВД (управления полетами).
5.1.8. В полете по ПВП командир воздушного судна несет ответственность за:
- выполнение правил и заданных условий полета по ПВП;
- выдерживание безопасных истинных высот;
- точность выдерживания маршрута полета, схемы выхода из района аэродрома и захода на посадку;
- своевременное решение и доклад органу ОВД (управления полетами) о возврате на аэродром вылета (запасный аэродром) или переходе на полет по ППП;
- достоверность информации о месте воздушного судна и условиях полета;
- точное и своевременное выполнение указаний органа ОВД (управления полетами).
5.1.9. Орган ОВД (управления полетами), под управлением которого выполняется полет воздушного судна по ПВП, несет ответственность за:
- назначение высоты (эшелона) полета и временных интервалов между воздушными судами;
- своевременную информацию экипажа о воздушной, метеорологической и орнитологической обстановке;
- освобождение безопасного нижнего эшелона (при полете ниже нижнего эшелона) и назначение нового эшелона с обеспечением установленных интервалов между воздушными судами при переходе на полет по ППП;
- согласование условий входа воздушного судна в смежный район ЕС ОрВД;
- точную и своевременную информацию экипажа о фактическом местонахождении воздушного судна при наличии радиолокационного (радиотехнического) контроля.
Читайте также: