
Заход на посадку по рсбн
Обновлено: 05.07.2024
Радиотехническая система ближней навигации РСБН-2 предназначена для обеспечения самолетовождения, захода на посадку в сложных метеоусловиях, контроля и управления движением самолетов с земли. Появление этой системы явилось большим достижением на пути автоматизации полета, обеспечения высокой точности самолетовождения и безопасности полетов.
Радиотехническая система РСБН-2 позволяет в зоне действия решать следующие задачи самолетовождения:
1. Непрерывно определять место самолета.
2. Выполнять полет по заданному маршруту.
3. Выводить самолет в любую заданную точку независимо от условий видимости с указанием момента подхода к точке и момента ее пролета.
4. Определять навигационные элементы полета (ФЛОТУ, путевую скорость самолета и угол сноса).
6. Наблюдать с земли по индикатору кругового обзора (ИКО) за самолетами, определять их координаты и опознавать самолеты, если они оборудованы самолетной аппаратурой системы опознавания.
В настоящее время многие аэродромы и самолеты гражданской авиации оснащены наземной и бортовой аппаратурой системы РСБН-2. Это требует от летного состава знания основных данных об этой системе и методов ее использования.
2. Основные сведения о РСБН-2
Радиотехническая система РСБН-2 является неавтономной системой самолетовождения. Она состоит из наземного и самолетного оборудования. Система работает на ультракоротких волнах, поэтому обмен сигналами между самолетом и наземным маяком возможен лишь на дальностях прямой видимости, которая в основном зависит от высоты полета (табл. 18.1) и может быть определена по формуле: Д км=3,57 √Нм.
Дальность действия РСБН-2
Высота полета, м
Дальность действия, км
В горной местности, а также при наличии препятствий на пути распространения ультракоротких волн дальность действия системы уменьшается и зависит от угла, под которым видна антенна наземного маяка с самолета (угла места наивысшей точки препятствия). Непосредственно над радиомаяком прием сигналов невозможен из-за наличия нерабочей воронки, радиус которой примерно равен высоте полета самолета.
Важным достоинством системы является большая пропускная способность и высокая точность выдаваемых координат места самолета. Система может одновременно обслуживать 100 самолетов. Пропускная способность ограничивается каналом радиодальномера. Канал азимута может обслуживать неограниченное количество самолетов одновременно, так как самолеты имеют только приемный азимутальный канал и не мешают друг другу.
Кроме двух пересекающихся под прямым углом стрелок, КППМ имеет третью стрелку — стрелку курса. В зависимости от типа КППМ она подключается к магнитному или гироскопическому датчику. Каждый тип КППМ соединяется только с определенными датчиками. Так, КППМ соединяется с ГИК-1 или с ДГМК-7; КППМ-1 и КППМ-С1 — с АП-15; КППМ-2 и КППМ-С — с курсовой системой. Способ подключения приборов КППМ к датчикам курса решается для каждого типа самолета в отдельности в зависимости от его оборудования.
РСБН-2 имеет 40 рабочих каналов. Каждый канал стабилизирован кварцем, что исключает взаимные помехи и обеспечивает возможность беспоискового приема ответных сигналов наземного маяка.

Для более полной реализации возможностей системы необходимо знать методы ее использования и уметь грамотно применять во всех режимах работы. Только при этих условиях РСБН-2 может обеспечить с большой точностью решение многих задач самолетовождения.
3. Применение РСБН-2 в полете
Угломерно-дальномерная система может быть применена в полете на любом участке трассы в зоне ее действия. Используется она по плану, намеченному в период подготовки к полету. В этом плане указывается, в каком режиме необходимо использовать систему на том или другом участке трассы и для решения какой навигационной задачи ее следует применять.
Рассмотрим методы использования системы и порядок работы с самолетным оборудованием при решении задач самолетовождения.
Определение места самолета с помощью РСБН-2. Для определения места самолета необходимо:
4. Установить на щитке управления штурмана номер канала работы наземного радиомаяка.
5. Прослушать позывные сигналы и убедиться, что система настроена на выбранный маяк.
Позывные сигналы наземного маяка передаются телеграфной азбукой и прослушиваются через СПУ. Громкость позывных сигналов регулируется потенциометром, расположенным на щитке пилота.
7. Через 5—6 мин после включения системы проверить работоспособность самолетного оборудования и произвести калибровку шкал азимута и дальности.
8. В тот момент, когда необходимо определить место самолета, произвести отсчет азимута и дальности на ППДА и заметить время. Отсчет азимута на приборе штурмана производится по двум шкалам. Шкала грубого отсчета оцифрована от 0 до 360° с ценой деления 10°, а шкала точного отсчета имеет оцифровку от 0 до 10° с ценой деления 0,1°.
На ППДА пилота азимут отсчитывается только по грубому каналу. Цена одного деления на шкале этого прибора равна 2. Дальность до маяка системы определяется по счетчику, позволяющему отсчитать текущую дальность с точностью до 0,1 км.
9. Отложить на карте от радиомаяка отсчитанный азимут и на его линии дальность (рис. 18.4). Полученная точка даст место самолета к моменту отсчета азимута и дальности.
Непрерывное указание координат места самолета системой позволяет с большей точностью решать основные задачи самолетовождения.
Выполнение полета от наземного радиомаяка. Полет от радиомаяка может быть выполнен в том случае, когда линия заданного пути строго совпадает с направлением от радиомаяка. Для выполнения полета от радиомаяка необходимо:
1. Включить самолетное оборудование системы и подготовить его к работе по заданному радиомаяку.

Рис. 18.3. Органы управления РСБН-2:
1 — щиток пилота; 2 — блок управления счетно-решающего прибора (БУ СРП); 3 — щиток управления штурмана

2. Установить на щитке управления штурмана:
а) номер канала работы наземного радиомаяка;
3. Установить на приборе КППМ против треугольного индекса значение ЗМПУ.
5. Пройти ИПМ с расчетным МК или с МК = ЗМПУ и определить по КППМ и ППДА, где находится ЛЗП по отношению к самолету.
6. Используя показания КППМ, вывести самолет на ЛЗП. Вертикальная стрелка КППМ указывает положение ЛЗП по отношению самолета, а стрелка курса по отношению к вертикальной стрелке показывает, под каким углом к ЛЗП направлена продольная ось самолета (угол подхода к ЛЗП).
Для полета по ЛЗП пилот обязан подобрать такой курс, при котором вертикальная стрелка находилась бы в центре шкалы прибора.
При наличии уклонения самолета от ЛЗП пилот обязан выйти на линию пути. Для выхода на линию пути самолет разворачивают в сторону вертикальной стрелки КППМ и приводят кружок стрелки курса к верхнему обрезу вертикальной стрелки. Такое положение кружка стрелки курса обеспечивает непрерывное уменьшение угла подхода к ЛЗП и плавный выход на линию пути.
Совместное использование стрелок КППМ обеспечивает простоту вывода самолета на ЛЗП и высокую точность выхода. При значительном уклонении самолета от ЛЗП до начала движения вертикальной стрелки от края шкалы к центру стрелку курса рекомендуется устанавливать перпендикулярно к вертикальной стрелке, что обеспечит более быстрый выход на ЛЗП. Для обеспечения плавного вывода самолета на заданное направление схема нуль-вождения КППМ имеет цепи ограничения, которые обеспечивают уменьшение угловой чувствительности вертикальной стрелки КППМ с увеличением сигнала рассогласования. Для того чтобы отклонение стрелки КППМ было пропорционально не угловому, а линейному отклонению самолета от заданного направления, в системе предусмотрена автоматическая регулировка чувствительности отклоняющей системы КППМ. Это обеспечивается введением в электрическую цепь КППМ функционального потенциометра, ось которого изменяет свое положение в зависимости от дальности до маяка. Линейная чувствительность схемы отрегулирована таким образом, что она практически не зависит от дальности. Схема нуль-вождения выполнена так, что при уклонении самолета от заданного направления в ней возникает напряжение рассогласования, которое преобразуется в напряжение постоянного тока и отклоняет вертикальную стрелку КППМ и тем самым указывает пилоту на необходимость маневра, обеспечивающего возврат самолета на заданное направление полета.
7. Осуществлять полет по ЛЗП, удерживая вертикальную стрелку КППМ в центре шкалы прибора. Стрелка курса при нахождении вертикальной стрелки в центре шкалы прибора устанавливается на подобранный курс следования с учетом угла сноса. При отсутствии сноса она будет показывать курс, равный путевому углу. При наличии сноса стрелка будет показывать курс, отличающийся от путевого угла на величину угла сноса. Для удобства пилотирования самолета необходимо на КППМ ручкой подвести подобранный курс против треугольного индекса.
8. Периодически уточнять курс следования с таким расчетом, чтобы он обеспечивал положение вертикальной стрелки КППМ в центре шкалы прибора.
9. Осуществлять контроль пути по направлению и дальности по показаниям ППДА.
Основным методом контроля пути по направлению при пилотировании самолета с помощью КППМ является сопоставление отсчитанного на ППДА азимута с ЗИПУ. Если азимут, отсчитанный на ППДА, соответствует ЗИПУ, то полет выполняется по ЛЗП. При уклонении самолета вправо азимут будет больше ЗИПУ, а при уклонении влево — меньше.
Контроль пути по дальности осуществляется путем наблюдения за текущей дальностью на ППДА с последующим расчетом путевой скорости и времени пролета контрольных точек маршрута.
10. Определить момент пролета контрольной точки по световым сигналам системы.
При полете от маяка РСБН-2 обеспечивает выдачу световых сигналов о подходе к заданной точке и ее пролете. Предупреждение о подлете к заданной точке и сигнализация о ее пролете осуществляются только в случае, если на щитке управления штурмана на селекторах азимута и орбиты установлены координаты заданной точки и самолет в ходе полета пройдет контрольную точку.
После пролета пункта гаснет красная лампа, а после выхода самолета из зоны предупреждения гаснет и зеленая лампочка.
Если самолет не пройдет точно над контрольной точкой, координаты которой установлены на щитке управления штурмана, то после предупредительного зеленого сигнала красная лампочка не загорается. При установке на щитке управления штурмана координат поворотного пункта маршрута для обеспечения выхода на ЛЗП следующего участка необходимо учитывать линейное упреждение разворота (ЛУР), т. е. при установке дальности ППМ необходимо уменьшить фактическую дальность на величину ЛУР. В этом случае в момент загорания красной лампы самолет будет находиться над точкой начала разворота.
11. Контролировать периодически исправность работы аппаратуры. Работа азимутального канала контролируется по бленкеру и сигнальной лампочке, а канала дальности — по сигнальной лампочке.
Выполнение полета на радиомаяк. Полет на радиомаяк может быть выполнен, если ЛЗП совпадает с направлением на радиомаяк, а дальность до него обеспечивает устойчивый обмен сигналами между самолетом и наземным маяком.
При полете на радиомаяк порядок работы с самолетным оборудованием такой же, как и при полете от радиомаяка. Исключение представляет положение некоторых переключателей, а именно:
Методика выполнения полета на радиомаяк аналогична методике выполнения полета от радиомаяка.
Войдя в зону действия радиомаяка экипаж, определяет по вертикальной стрелке КППМ и по значению азимута на ППДА положение самолета относительно ЛЗП.
Выход на ЛЗП осуществляется по показаниям КППМ. Пилот непрерывно удерживает в совмещенном положении стрелку курса с верхним обрезом вертикальной стрелки КППМ. Такое совмещение стрелок в процессе выхода обеспечивает одновременный разворот самолета с приближением его к ЛЗП по плавной кривой.
Полет по ЛЗП осуществляется с помощью КППМ, показания которого при полете на радиомаяк остаются такими же, как и при полете от радиомаяка, т. е. вертикальная стрелка указывает где находится ЛЗП относительно самолета. Если вертикальная стрелка КППМ удерживается в центре черного кружка, то полет происходит по ЛЗП.
Контроль пути по направлению при полете на радиомаяк осуществляется по показаниям КППМ и ППДА. Сравнение показаний ППДА с заданным азимутом является основным методом контроля пути по направлению. Если фактический азимут, отсчитанный на ППДА, соответствует заданному, то самолет находится на ЛЗП; если фактический азимут больше или меньше заданного, то самолет находится соответственно слева или справа от ЛЗП (см. рис. 18.5).
Контроль пути по дальности ведется путем наблюдения за текущей дальностью, непрерывно указываемой счетчиком ППДА.
Момент пролета ППМ (КО), как и при полете от радиомаяка, определяется по световой сигнализации. Для этого на щитке управления штурмана на селекторах азимута и орбиты должны быть установлены координаты того пункта, момент пролета которого необходимо определить по световым сигналам системы.
Выполнение полета по орбите. Полетом по орбите называется полет по окружности с заданным радиусом, центром которой является радиомаяк. Такой полет может быть применен в том случае, когда линия заданного пути совпадает с окружностью. Например, если два ППМ находятся в зоне действия системы и расположены на одинаковом расстоянии от радиомаяка, то полет между этими пунктами можно выполнить по орбите.
Для выполнения полета по орбите необходимо:
1. Установить на щитке управления штурмана:
а) канал работы наземного радиомаяка;


радиомаяк находится слева от самолета; если радиомаяк оправа от самолета, то орбита будет правая;
3. Установить на КППМ значение МПУ, соответствующее направлению орбиты в точке выхода на нее самолета (рис. 18.6).
4. Выйти к точке начала разворота и развернуть самолет на курс, равный примерно МПУ для точки выхода на орбиту. Для обеспечения плавного выхода на заданную орбиту этот разворот начинают с учетом линейного упреждения разворота. При полете к заданной орбите по азимуту величина ЛУР равна радиусу разворота самолета.
Похожие документы:
Занятие №1. Введение. Учебные вопросы занятия: Понятие о хирургии и хирургических болезнях
К 1933 г на вооружение поступили торпеды тан-12 для низкого торпедометания (с бреющего полета) и тав- 15 для сброса с парашютами, а также авиационная мина мав
. политрук – Турукин Г.М. начальник технической части - Кораблин Н.П. начальник АХЧ – Лазарев Д.Е. руководители опытов . - 7-цилиндровый, звездообразный, воздушного охлаждения, четырехтакт ный, безредукторный, с одноступенчатым односкоростным ПЦН; • .
Конкурс проводится в два тура Iтур Золотое кольцо России
. ). Вне зависимости от длины произведения повествовательная структура Паустовского — . названа Кораблинская СОШ № 1 и улица в Кораблино Имеет отношение к населенным пунктам: город . СОШ № 1 и улица в городе Кораблино. село Семион Родилась 12 октября .
. процессам относятся психические процессы, связанные с восприятием и переработкой информации . расстройства — инициальные (начальные) формы психических аномалий, при . ПСИХОЛОГИЯ Научный редактор Е. Кораблина Данная книга посвящена исследованиям .
Главный редактор Зав психологической редакцией Зам зав психологической редакцией Ведущий редактор Редактор Художник обложки Корректор Верстка ббк 88. 35я7
Самостоятельный заход на посадку на незапрограммированный аэродром в сложных метеорологических условиях с использованием РСБН может быть выполнен только с прямой.
Для выполнения захода необходимо на щитке управления РСБН нажать кнопки-лампы СБРОС и ВОЗВРАТ и переключателями каналов НАВИГАЦИЯ и ПОСАДКА установить частотно-кодовые каналы радиомаяка РСБН и ПРМГ аэродрома посадки. Переключатель РСБН-АРК установить в положение РСБН. Установить скорость полета 500 км/ч.
Выход на радиомаяк РСБН выполнить с курсовым углом маяка, уточненным на величину угла сходимости меридианов. Момент пролета радиомаяка РСБН определяется поворотом стрелки КУР на 180° и изменением направления отсчета на ППД (в момент прохода на ППД индицируется дальность, равная высоте полета). После пролета радиомаяка РСБН ввести самолет в разворот с креном 30° для выхода на линию расчетного азимута от радиомаяка РСБН в ТНРР.
Полет в ТНРР выполнить по расчетному азимуту с курсом, учитывающим угол сходимости меридианов. Контроль выхода в ТНРР по показаниям ППД и истечении расчетного времени полета.
Вторую половину разворота выполнять с контролем совмещения стрелки КУР со стрелкой курсозадатчика по мере разворота на посадочный курс. За 90° до разворота на посадочный курс угол между стрелками будет 6-8°, за 45° - около 2°, а к моменту разворота на КУР = 0° стрелки должны совместиться. Если величина угла в этих точках будет отличаться от указанной, то изменением крена уточнить выход на посадочный курс. В последней четверти разворота контролировать выход на курсовую линию КРМ по приближению курсовой планки положения на НПП к центральному кружку шкалы.
После окончания разворота на посадочный курс на 30-секундной площадке уменьшить скорость до 400 км/ч, выпустить шасси и механизацию крыла в маневренное положение и установить скорость 350 км/ч.
Дальнейшие действия летчика на посадочном курсе аналогичны действиям при заходе на посадку с прямой на запрограммированный аэродром.
Заход на посадку с расчетного рубежа
Заход на посадку на незапрограммированный аэродром может быть выполнен с расчетного рубежа. Этот режим удобен для летчика, так как позволяет выполнить заход на посадку в минимальное время и по кратчайшему пути, как в простых, так и в сложных метеорологических условиях.
Для выполнения захода на посадку с расчетного рубежа необходимо установить связь с КП аэродрома посадки, сообщить свою высоту и с курсом, заданным КП, следовать на рубеж начала снижения. На ЩУ РСБН нажать кнопки-лампы СБРОС и ВОЗВРАТ, переключателями НАВИГАЦИЯ и ПОСАДКА установить частотно-кодовые каналы радиомаяка РСБН и ПРМГ аэродрома посадки, переключатель РСБН-АРК установить в положение РСБН. Проверить загорание лампы КОРР. и прослушать позывные радиомаяка РСБН аэродрома посадки.
При подходе к рубежу начала снижения получить от руководителя полетов условия захода и посадки, установить на указателе высоты полученное значение барометрического давления.
При выходе на расчетный рубеж начала снижения по команде КП довернуть самолет на заданный курс и перевести его на снижение с установленным режимом. Направление снижения и вертикальная скорость даются с таким расчетом, чтобы самолет вышел в точку начала разворота на посадочный курс на высоте 2000 м (установленной для данного аэродрома). При полетах с учебной целью снижение производится на скорости 500 км/ч с вертикальной скоростью 30 м/с.
В процессе снижения по командам КП своевременно вносить поправки в курс следования и вертикальную скорость снижения в целях точного выхода в ТНРР.
Разворот на посадочный курс выполнить по команде КП, предварительно установив стрелку курсозадатчика на посадочный курс с учетом сходимости меридианов, включить выключатель ПОСАДКА на ЩУ РСБН, установить переключатель РСБН-АРК в положение АРК.
Вывод из разворота выполнить на курс, обратный посадочному, а при наличии бокового ветра обязательно ввести поправку в курс на угол сноса (доворот в наветренную сторону).
На траверзе ДПРС пустить секундомер и продолжать полег на скорости 500 км/ч.
На дальности 20 км по ППД с контролем по времени полета от траверза ДПРС включить выключатель ПОСАДКА на ЩУ РСБН и начать выполнение второго разворота на 180°. Разворот выполнять в горизонтальном полете с креном 30° на скорости 500 км/ч с уменьшением к концу разворота до 450 км/ч.
После окончания разворота уменьшить скорость до 400 км/ч, выпустить шасси и механизацию крыла в маневренное положение и установить скорость 350 км/ч. На дальности 12-13 км выпустить механизацию крыла во взлетно-посадочное положение и после совмещения планки положения глиссады с центральным кружком шкалы НПП перевести самолет на снижение по глиссаде. Дальнейшее снижение и посадку выполнить в том же порядке, как и при заходе с прямой, с учетом ошибок, вызвавших уход на повторный заход.
Дальнейшие действия летчика по выходу на посадочный куре и на посадочном курсе такие же, как и при заходе на посадку с прямой
Заход на посадку двумя разворотами на 180°
После ухода на второй круг необходимо убрать шасси, механизацию крыла в два этапа и установить скорость 500 км/ч. Отключить на ЩУ РСБН выключатель ПОСАДКА. Убедиться, что переключатель РСБН-АРК находится в положении АРК, а стрелка курсозадатчика установлена на посадочный курс (при пролете над ВПП уточнить правильность установки курсозадатчика на значение посадочного курса с учетом угла сходимости меридианов). После набора заданной высоты (600 м) на удалении 4-6 км от радиомаяка РСБН выполнить разворот с креном 30° на курс, обратный посадочному. При необходимости разворот может быть начат раньше после набора высоты 200 м, но скорость в процессе разворота должна быть равной 500 км/ч, с тем, чтобы обеспечить нормальную ширину маршрута и выполнение второго разворота на 180° с креном 30°.
Меры безопасности
При заходе на посадку необходимо:
- в процессе всего полета вести непрерывно радио и визуальную осмотрительность;
- на посадочном курсе не допускать потери высоты менее 200 м до выхода на ДПРМ, правильно распределять внимание при выполнении доворотов для исправления отклонений по направлению. Сигнализатор опасной высоты радиовысотомера установить на высоту 200 м;
q до прохода ДПРМ (выхода под облака) пилотировать самолет только по приборам;
q полеты выполнять с включенным обогревом ПВД и стекол;
q при попадании в зону обледенения доложить РП (КП) и изменить высоту и скорость полета;
q при наличии обледенения после выпуска механизации в ВПК возможно появление тряски, которая пропадает с уменьшением скорости менее 300 км/ч.
Заход на посадку можно условно разделить на четыре этапа:
подход по схеме аэродрома (до момента входа в глиссаду)
собственно заход на посадку (от входа в глиссаду до пересечения входной кромки ВПП)
приземление, или собственно посадка (от пересечения кромки ВПП до уверенного касания)
пробег (от касания до полной остановки)
Подход по установленной схеме
После снижения с эшелона, самолет встраивается в схему посадки, снижаясь до высоты круга. На карте представлена такая типичная схема подхода для ВПП15 (взлетно-посадочная полоса 15) аэропорта Курумоч (Самара).

Соответственно различают заходы
от третьего (разворота)
от траверза ДПРМ
Траверз (от лат. traversus — поперечный) — направление перпендикулярное продольной оси воздушного судна. При пролете траверза ДПРМ, он будет точно слева или справа. О том, что такое ДПРМ см ниже.
Глиссада (от фр. glissade — скольжение) — прямолинейная траектория (или точнее плоскость) снижения летательного аппарата на конечном этапе захода на посадку.
РСБН — радиотехническая система ближней навигации. Имеет дальномерный и азимутальный канал, и функционально аналогична комплексу VOR-DME.
Угол наклона глиссады (УНГ)
Нормальный угол залегания глиссады принят равным 2 град 40 мин, т.е. обычно глиссада лежит достаточно полого. УНГ выбирается с учетом расположения препятствий по курсу захода, поэтому для горной местности высота круга, и соответственно УНГ может быть больше — до 4 град.
Вертикальная скорость снижения по глиссаде должна быть практически постоянна. Она зависит только от УНГ, поступательной скорости самолета и определяется по формуле
где a — угол залегания глиссады
Следовательно, при средней поступательной скорости захода реактивного самолета 270 км/ч (150 kts), мы получим
для УНГ= 2,7 град, Vy=3.5 м/c
для УНГ= 4 град, Vy=5.2 м/c
Отсюда следует запомнить, что для стандартной глиссады скорость снижения должна составлять примерно 3-4 м/c и почти никогда не должна превышать 6 м/c
Заход по прямоугольному маршруту
Предположим, что мы вписываемся в круг в районе траверза ВПП. В этом случае при заходе в штурвальном (директорном) режиме действия экипажа Ту-154 будут иметь следующий вид (для других ВС схема будет достаточно сходная, отличаться будет, главным образом, скорость, и углы выпуска механизации):
полет на высоте круга
Самолет перешел в горизонтальный полет на высоте круга. На скорости 400 км/ч КВС (командир воздушного судна) устанавливает задатчик стабилизатора в положение соответствующее центровке (но сам стабилизатор еще не перекладывается). По решению и команде КВС, 2П (второй пилот), подготавливает и включает автомат тяги для автоматического управления двигателями.
полет от траверза ДПРМ
третий разворот
Угол крена 15-25 град. Скорость 360-370 км/ч. Момент начала третьего разворота определяется по команде диспетчера, по положению стрелки АРК, по показаниям НВУ (навигационно-вычислительное устройство) или строго по расчетному времени полета от траверза ДПРМ. После катастрофы в Иркутске МАК рекомендовал входить в третий разворот с закрылками уже выпущенными на 15 град, не знаю правда, что это изменит, пить-то все равно надо меньше. Короче, по классической схеме выпуск закрылков осуществляется только после третьего разворота.
полет от третьего до четвертого разворота
После выхода из разворота КВС подает команду: "Cкорость 340-360. Закрылки 28". 2П (второй пилот) задает на УС-И скорость 340 км/ч и переводит рукоятку закрылков в положение "28 град", при этом также автоматически выпускаются предкрылки (на 22 град) и стабилизатор устанавливается в согласованное положение (0, -3 или -5.5). Штурман контролирует выпуск механизации и докладывает "Закрылки выпускаются синхронно, стабилизатор перекладывается на кабрирование, предкрылки выпускаются", а после выпуска механизации — "Механизация выпущена".
Далее, в зависимости от конкретной схемы заходы, например, если высота круга большая приступают к планированию с небольшой вертикальной скоростью (1-3 м/c), либо продолжают выдерживать высоту круга. При подходе к четвертому развороту для поддержания скорости 300-320 км/ч при пилотировании в штурвальном режиме нужно немного увеличить режим двигателей.
четвертый разворот
Четвертый разворот обычно располагается на расстоянии порядка 12-16 км от ВПП. Начало выполнения разворота определяется по команде диспетчера или по положению стрелки АРК — обычно за 10-15 град до прохождения створа полосы (см по схеме). Чтобы вписаться в створ, разворот должен выполняться очень точно и аккуратно. Угол крена 15-20 град.
на предпосадочной прямой
После выхода из 4-го разворота на скорости не более 300 км/ч КВС дает команду "Закрылки 45", после чего 2П выпускает закрылки полностью, при этом стабилизатор автоматически перекладывается на максимальный угол (=предкрылки уже выпущены полностью на 22 град). По команде КВС, штурман проводит контроль по карте (раздел "Перед входом в глиссаду"). Ночью штурман также выпускает фары.
Самолет теперь находится в горизонтальном полете по предпосадочной прямой пока еще ниже плоскости глиссады на расстоянии 2-3 км от ТВГ. Если до входа в глиссаду средства механизации не выпущены в посадочное положение, то дальнейшее снижение и заход на посадку запрещаются.
вход в глиссаду
Отметим, что в англоязычных странах круг полетов измеряется не разворотами как у нас, а "ногами", т.е. отрезками между разворотами. Соответственно различаются,
upwind leg — "нога против ветра", отрезок между 4-м и 1-м разворотом
crosswind leg — "нога поперек ветра", между 1-м и 2-м
downwind leg — "нога по ветру", между 2-м и 3-м
base leg — "основание", между 3-м и 4-м
final "файнэл"— предпосадочная прямая
procedure turn "прэсиджэr тёrн"— разворот (по схеме)
Заход с прямой
При заходе с прямой, например, от ОПРС Кошки, выполняется только относительно небольшой доворот для вписывания в предпосадочную прямую. При этом экипажем выполняются те же операции, но привязка идет не к положению разворотов, а к расстоянию до ВПП:
22-25 км до ВПП — выпуск шасси (в снижении)
12-16 км — переход в горизонтальный полет и полный выпуск закрылков
Заход на посадку на различных типах ВС
В случае других типов ВС предпосадочное маневрирование и заход выполняются сходным образом, в основном, различаются только массы, скорости и углы выпуска механизации.
В таблице собраны данные для некоторых самолетов отечественного производства. Обратите внимание, что скорости различаются не очень сильно, несмотря на значительное различие в массах.

Данные приведены, в основном, для больших посадочных масс. Для меньших масс, скорости будут соответственно на 5. 15 км/ч меньше.
Кроме прочности шасси, посадочная масса ограничена большой посадочной скоростью и возможностью обеспечения нормального градиента набора высоты с одним отключенным двигателем в случае ухода на второй круг.
Посадка с максимальной взлетной массой (98 т для Ту-154Б, 100 т для Ту-154М) возможна только, если КВС забыл выключить дома самогонный аппарат, поцеловать тещу, покормить аквариумных рыбок, короче в каких-то очень экстренных ситуациях типа пожара на борту. При такой посадке скорость на глиссаде должна быть не менее 315 км/ч при закрылках выпущенных на 28 град. В других случаях посадочная масса уменьшается выработкой топлива.
Настройка частоты ILS
Прожуйте скорее ваш бутерброд, мы приступаем к заходу на посадку.
Перед заходом прежде всего убедитесь, что правильно выставлена радиочастота системы ILS и магнитный курс посадки (МКпос)
Например, мы летим из Франции, садимся в Шереметьево и нам нужна “Шереметьево RNW 06R” (рануэй зироу-сыкс райт), по-русски говоря, “ВПП 06 правая.”
Посадочный курс для нее составляет 67 градусов, частота ILS 108.10. Если заходить с противоположной стороны, то, как нетрудно догадаться, та же полоса будет иметь обратный курс посадки 67 + 180 = 247 град и номер 25L. Частота ILS будет уже другая.
По нормам ICAO номер полосы должен выбираться в соответствии со значением магнитного курса посадки. Например, для курсов 15. 24 град номер должен быть 02 и т.д. Почему же тогда полоса в Шереметьево в реальности обозначается 06, а не 07? Не все полосы пронумерованы точно. Возможно, это связано с постепенным изменением магнитного склонения и первоначальными погрешностями в измерении магнитного курса.
Точное расстояние можно определить по указанииям системы DME (Distanсe Measuring Equipment, дальномерное оборудование), индикаторы которой обычно расположены прямо перед глазами пилота, например, в случае Ту-154 на ПНП-1 (планово-навигационный прибор, или проще говоря, указатель курса).
Работа самолетных радиодальномеров основана на радиолокационном методе определения дальности. DME это вражеский стандарат, у нас используются свои дальномерные системы СД-67, СД-75 и пр.
Если ILS настроена правильно, то DME будет показывать расстояние до полосы в километрах или в морских милях (в симе: в зависимости от выбора системы мер в меню, либо от самого прибора).
Отметим, что сокращения типа ILS, VOR, DME на русский не переводятся— в советских изданиях иногда даже пишут русскими буквами ИЛС, ВОР, ДМЕ. Однако у нас существуют функционально аналогичные системы — например, СП (система посадки), РСБН (радиотехническая система ближней навигации, по смыслу соответствует VOR +DME) и т.д. В частности, пилотажно-навигационный комплекс Ту-154 раздельно предусматривает работу как с отечественными, так и западными системами.
Как уже было сказано, применение наземной и бортовой систем ближней радионавигации дает возможность автоматизировать процессы пилотирования самолета на этапе привода его на аэродром посадки.
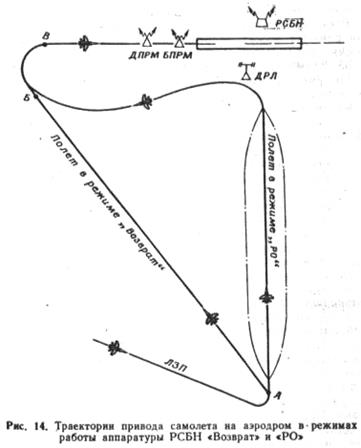
Рассмотрим варианты вывода самолета в район аэродрома, построения предпосадочного маневра и захода на посадку с использованием наземной аппаратуры РСБН-4Н (РСБН-2Н) и бортовой аппаратуры РСБН-6С при полете на максимальную дальность, когда время полета и запас топлива ограничены.
После выполнения боевого задания летчик должен, выбрав оптимальный вариант, вывести самолет на аэродром посадки.
Проанализируем два варианта выхода на аэродром:
В обоих случаях может быть использован автопилот или самолет может пилотироваться летчиком в ручном режиме управления по стрелке заданного курса, по курсовой планке положения или по директорией стрелке.
Кроме того, при полетах с одного аэродрома разнотипных самолетов вывод всех этих самолетов в точку Б будет невозможен, так как на некоторых из них может быть установлена не аппаратура РСБН-6С, а другая (РСБН-2С, РСБН-5С), не обеспечивающая такого вывода. В этом случае руководитель полетов для упрощения процесса руководства полетами будет направлять самолеты в общую для всех точку района аэродрома, а .именно на радиомаяк РСБН, на который и осуществляется привод всех самолетов по способу полета на радиоориентир.
Объясняется это тем, что диаграмма направленности в вертикальной плоскости антенны радиомаяка РСБН-4Н (2Н, 6Н) имеет большую неравномерность, увеличивающуюся по мере увеличения угла места.
Следует помнить, что по мере приближения самолета к радиомаяку при сохранении высоты полета угол места постоянно увеличивается. По этой причине на малых удалениях от маяка самолет может попасть или в зону полного отсутствия сигналов маяка, или в зону неустойчивых сигналов, где влияние всякого рода помех резко возрастает.
Если вести расчет по главному (первому) лепестку диаграммы направленности антенны радиомаяка в вертикальной плоскости, имеющему максимум излучения под углом 1° к горизонту (следующий максимум находится под углом 3°), то при высоте полета 1000 м и более минимальное расстояние, при котором самолет еще будет находиться в пределах главного лепестка, должно быть около 60 км. Практически без существенного снижения качества приема сигналов маяка диаграмма направленности может быть использована до третьего – четвертого лепестков, то есть до удаления 20-15 км. При этих удалениях влияние мешающих сигналов еще существенно не проявляется. Для бортового оборудования РСБН-6С и РСБН-5С, обладающего низкой избирательностью по соседним и зеркальным каналам приема, а также по комбинационным частотам, мешающими сигналами могут быть сигналы посадочных радиомаяков типа ПРМГ-4 (по соседним каналам) и диспетчерского радиолокатора (по зеркальным каналам и комбинационным частотам), мощность излучения которого, в том числе по боковым лепесткам диаграммы направленности, во много раз превосходит мощность излучения радиомаяка РСБН-4Н.
Учитывая преимущества и недостатки описанных способов привода самолета на аэродром посадки, подведем некоторые итоги.
В целях улучшения избирательных характеристик бортовых приемников СПАД-2И, входящих в состав аппаратуры РСБН-6С, в настоящее время разработан и внедряется фильтр ВТ-012.
Применение этого фильтра улучшает соотношение полезных и мешающих сигналов на входе приемника за счет значительного повышения избирательности по зеркальному каналу и комбинационным частотам. Однако фильтр ВТ-012 не снимает ограничений по углу места самолета на малых дальностях до маяка, так как он не улучшает избирательности по соседнему каналу.
Мешающими сигналами по соседнему каналу, как уже говорилось, могут быть сигналы курсового радиомаяка систем инструментальной посадки типа ПРМГ-4. С учетом зоны действия курсового радиомаяка ±15° относительно оси ВПП его сигналы могут поступать на вход бортового приемного устройства как мешающие, когда самолет находится на расстоянии 2-3 км от оси ВПП при приближении к ней по перпендикулярным направлениям и с 45 км в случае приближения с посадочным курсом.
Итак, фильтр ВТ-012 хотя и уменьшает влияние мешающих сигналов на малых удалениях от радиомаяка РСБН-4Н, но ограничений по углу места самолета не снимает. Преобладающее значение на малых удалениях приобретает неравномерность диаграммы направленности антенны радиомаяка РСБН-4Н в вертикальной плоскости.
В заключение еще раз необходимо подчеркнуть важность теоретического и практического освоения современных инструментальных радиотехнических систем привода на аэродром и захода на посадку, с тем чтобы полностью использовать их технические возможности в реальных особо сложных метеорологических условиях. Это обеспечит высокий уровень всепогодности применения самолета и, как следствие, повысит боеготовность и безопасность полетов нашей авиации.
Читайте также: