
Заход на посадку в сложных условиях
Обновлено: 12.09.2024
1. Посадка с боковым ветром. Летные ограничения при выполнении посадки с боковым ветром в зависимости от состояния ВПП указаны в разд. 4.1.
После приземления, плавно опустить самолет на колеса передней стойки шасси, выдерживая направление движения по оси ВПП рулем направления. Включается реверс тяги внешних двигателей и при устойчивом пробеге по направлению выпускаются тормозные щитки и гасители подъемной силы.
2. Посадка на ВПП, покрытую осадками. При посадке самолета на мокрую, покрытую слоем воды или слякоти, а также обледеневшую ВПП значительно увеличивается длина пробега и усложняется выдерживание направления пробега, особенно при наличии хотя бы слабого бокового ветра. Ограничения по скорости бокового ветра на ВПП) покрытую осадками, указаны в разд. 4.1.
Увеличение длины пробега и усложнение выдерживания направления на пробеге зависит от вида и толщины осадков.
На влажной ВПП несколько уменьшается коэффициент сцепления, понижается эффект торможения колес и увеличивается длина пробега.
На мокрой ВПП понижается коэффициент сцепления, а также появляются гидродинамические силы воды, действующие на колеса шасси, причем величина коэффициента сцепления и гидродинамических сил переменная, так как вследствие неровностей ВПП слой воды различный и большая часть поверхности ВПП выступает над водой. При пробеге на такой полосе самолет рыскает, чем значительно усложняется выдерживание направления. Длина пробега увеличивается.
На ВПП, покрытой слоем воды или слякоти, уменьшается коэффициент сцепления, на колеса самолета действуют гидродинамические силы и до скорости не менее 62,2Öрш/r = 187 км/ч действует эффект глиссирования колес (см. разд. 4.5 п. 2).
При посадке на такую ВПП значительно увеличиваются длина пробега, в среднем почти в два раза по причине потери эффекта тормозов. Самолет на пробеге рыскает, передние колеса не эффективны и во второй половине пробега, где руль направления также не эффективен, направление выдерживать почти невозможно.
Учитывая эти особенности пробега самолета на ВПП, покрытой осадками, следует:
1) при определении допустимого посадочного веса по номограмме (см. рис. 54) за исходную длину ВПП принимать фактическую длину ВПП, уменьшенную в 2 раза при слое мокрого снега 12 мм, и в 1,55 раза при слое воды 10 мм (сильный дождь);
2) с целью сокращения длины, пробега посадку выполнять с точным расчетом, не допуская перелета, при нормальной посадочной конфигурации (dз=43°, dпр=25°), с выпуском гасителей подъемной силы и тормозных щитков и использованием реверса тяги двигателей до полной остановки самолета. При подготовке к посадке путем расхода топлива уменьшить посадочный вес до минимально допустимого. Помнить, что до скорости не менее 62,2Öрш/r = 187км/ч колеса шасси могут глиссировать, причем белесый след от глиссирования начинается через 250—400 м после касания ВПП и начала глиссирования. Это дает возможность определить момент касания самолета при посадке. На снижении и при посадке не допускать превышения скорости;
4) посадка на ВПП, покрытую осадками, с коэффициентом сцепления менее 0,3 недопустима:
Механическое удерживание земляных масс: Механическое удерживание земляных масс на склоне обеспечивают контрфорсными сооружениями различных конструкций.

Опора деревянной одностоечной и способы укрепление угловых опор: Опоры ВЛ - конструкции, предназначенные для поддерживания проводов на необходимой высоте над землей, водой.

Организация стока поверхностных вод: Наибольшее количество влаги на земном шаре испаряется с поверхности морей и океанов (88‰).
Поперечные профили набережных и береговой полосы: На городских территориях берегоукрепление проектируют с учетом технических и экономических требований, но особое значение придают эстетическим.
Заключительным этапом любого полета является заход на посадку и посадка, которые с точки зрения безопасности считаются наиболее сложными и ответственными. Сложность обусловлена тем, что пилотирование ВС ведется в условиях значительного изменения высоты, скорости полета и частых разворотов, а также высокими требованиями к выдерживанию заданного маневра снижения и захода на посадку. Поскольку с повышением регулярности полетов экипажам ВС все чаще приходится выполнять заход на посадку в сложных метеоусловиях, принимаются меры по оборудованию аэродромов современными системами посадки. На ВС устанавливают специальное оборудование, позволяющее выполнять полуавтоматический и автоматический заход на посадку. Это требует от летного состава умения выполнять заход на посадку по приборам. Для поддержания требуемого уровня профессиональной подготовки пилоты систематически проходят тренировки на тренажерах, а также в реальных сложных погодных условиях.
Посадка ВС на аэродроме производится на ВПП , имеющую как правило два направления захода на посадку. Обычно посадку выполняют при встречном и встречно-боковом ветре. При этом для каждого типа ВС боковая составляющая ветра не должна превышать предельного значения, указанного в РЛЭ .
Курс, соответствующий рабочему направлению ВПП , называется посадочным . Заход на посадку выполняют по установленной для данного аэродрома схеме. Заключительная часть этой схемы от точки выхода из четвертого разворота до точки приземления называется предпосадочной прямой . Она устанавливается такой длины, чтобы обеспечивалось безопасное снижение ВС с высоты круга полетов над аэродромом до его приземления.
В настоящее время применяют три типа систем посадки: радиотехническую ( ОСП ), радиомаячную ( РМС ), радиолокационную ( РСП ). В аэропортах нашей страны в качестве РМС эксплуатируются отечественные системы типа СП и различные варианты международной системы ИЛС .
Н аземное и бортовое оборудование системы посадки обеспечивает вывод ВС на аэродром, полет по установленной схеме захода и снижение по заданной траектории. Каждый аэродром, как правило, оборудуется дальней ДПРМ и ближней БПРМ приводными радиостанциями с радиокамерами, а также светосигнальными системами, огни которых облегчают взлет, посадку и руление ВС . ДПРМ – основная радионавигационная точка аэродрома. Радиосветотехнические средства обеспечения полетов на аэродромах размещают по утвержденным типовым схемам с учетом особенностей данного аэродрома (рис.1).
Основная задача любой системы посадки – обеспечение вывода ВС на линию курса и глиссаду снижения. При использовании посадочных систем под линией курса понимается горизонтальная линия, проходящая через продольную ось ВПП . Глиссадой снижения называется траектория снижения ВС в вертикальной плоскости при заходе на посадку. За траекторию снижения принимается линия движения нижней точки шасси. Выход на линию заданного посадочного курса и полет по ней при заходе на посадку по системе ОСП выполняют по ДПРМ , а после его пролета – по БПРМ . При заходе на посадку по РМС на указанную линию выходят по радиосигналам курсового радиомаяка ( КРМ ).
Для системы ОСП устанавливается расчетная глиссада, а для РМС – радиотехническая, которая задается с помощью глиссадного радиомаяка ( ГРМ ). Положение ВС относительно расчетной глиссады контролируют обычно только в двух точках при полете ДПРМ и БПРМ . При заходе на посадку по РМС информация о положении ВС относительно радиоглиссады выдается непрерывно на специальный указатель.
Для обеспечения безопасной высоты пролета препятствий, расположенных в секторе захода на посадку, для каждого направления захода на посадку устанавливается определенный угол наклона глиссады ( УНГ ). Поскольку зоны учета препятствий при заходе на посадку по системам ОСП и РМС имеют различные размеры, УНГ для указанных систем может быть неодинаковым. Правилами предусмотрено устанавливать УНГ в диапазоне 2 градуса 30 минут – 4 градуса . Рекомендуемые УНГ 2 градуса 40 минут – 3 градуса . В отдельных случаях для ВС третьего и четвертого классов допускается устанавливать УНГ до 5 градусов . При оптимальном УНГ = 2ЧО’ ВС пролетает ДПРМ и БПРМ при их стандартном расположении на высотах соответственно 200 и 60 м .
Для аэродромов ГА установлены посадочные минимумы трех категорий, характеризуемые высотой принятия решения ВПР , которая соответствует высоте нижней границы облаков ( ВНГО ) и дальности видимости на ВПП . Минимум первой категории предусматривает заход на посадку до ВПР 60 м при дальности видимости на ВПП 800 м ; минимум второй категории: ВПР менее 60 м , но не менее 30 м , видимость на ВПП менее 800 м , но не менее 400 м ; минимум третьей категории: ВПР менее 30 м , видимость на ВПП менее 400 м . Таким образом, минимум аэродрома для посадки отражает минимально допустимые значения ВПР ( ВНГО ) и видимости на ВПП , при которых разрешается выполнять посадку на ВС данного типа.
Высота принятия решения ( ВПР ) – установленная относительная высота, на которой должен быть начат маневр ухода на второй круг (рис.1) в тех случаях, если до достижения этой высоты командиром ВС не был установлен необходимый визуальный контакт с ориентирами для продолжения захода на посадку или положение ВС в пространстве, или параметры его движения не обеспечивают безопасности посадки. ВПР принято отсчитывать от уровня порога ВПП по барометрическому высотомеру, который установлен на атмосферное давление аэродрома посадки. Под необходимым визуальным контактом с ориентирами подразумевается контакт с наземными ориентирами зоны захода на посадку или ВПП , которые командир ВС должен видеть в течение времени, достаточного для оценки положения ВС , и скорости изменения его положения относительно заданной траектории полета.
Для каждого аэродрома устанавливают определенные схемы снижения и захода на посадку, которые разрабатывают в соответствии с утвержденной методикой. При этом учитывают рельеф местности, направление расположения ВВП , особенности воздушной обстановки в районе аэродрома, направление подходов к нему и радиотехническое оборудование, экономичность и интенсивность полётов.
В гражданской авиации применяются следующие схемы снижения и захода на посадку: с прямой, по прямоугольному маршруту (малому небольшому), отворотом на расчётный угол, с подходом к направлению посадки под углом 45 градусов , стандартным разворотам и с обратного направления. Каждая схема имеет определённый вид и геометрические размеры. Для стандартизации схем по типам ВС принято три варианта схемы: первый - для ВС , у которых приборная скорость полёта по кругу более 300 км/ч ; второй - для ВС , имеющих приборную скорость полёта по кругу от 200 до 300 км/ч ; третий - для ВС , у которых приборная скорость полёта по кругу менее 200 км/ч . Схемы захода для каждого варианта рассчитывают применительно к тому ВС , которое при заходе на посадку на данном аэродроме имеет наибольшую приборную скорость полёта по кругу. Для каждого курса посадки составляют отдельную схему захода. Расчёт схем захода по ППП принято производить для угла крена на разворотах 15 или 25 градусов , а схем визуального захода - с углом крена 20 градусов . Схемы с углом крена 25 градусов на аэродромах ГА вводятся указанием МГА .
В зависимости от варианта схемы и угла крена на разворотах принята различная ширина манёвра захода на посадку, которая приведена в таблице 1 .

Заход на посадку и уход на второй круг — по статистике самые опасные этапы полёта.
Давайте разбираться, как это работает, и пользуясь моментом, посмотрим как устроена электронная система управления современным самолётом.
Но перед тем, как мы начнем, я вынужден обозначить эдакий дисклеймер: я действующий пилот Airbus семейства 320, который является самолетом 4-го поколения (отличительный признак которого — наличие технологии Fly-by-Wire). Соответственно, многие специфические системы и процедуры, описываемые в посте, будут привязаны к данному типу. На других типах (например Boeing 737 Classic/NG/MAX, которые являются самолетами предыдущего, 3-го поколения без технологии Fly-by-Wire) процедуры и логика построения и работы систем может значительно различаться. И да, я не имею отношения к инженерно-авиационной службе и службе ОрВД (организации воздушного движения), поэтому уж простите возможные огрехи в описании матчасти.
Краткий ликбез по 4 поколению самолетов (Fly-by-Wire)
Наверное, многие из вас наслышаны о технологии Fly-by-Wire (ЭДСУ или электродистанционная система управления по-нашему). Если кратко пробежаться по истории развития систем управления самолетом, то это выглядело примерно так:
- прямая механическая связь между штурвалом и аэродинамическими поверхностями (в общем случае это — элеронами, рулем направления, горизонтальным стабилизатором, триммерами и т.д.);
- появление гидроусилитей/бустеров/пружинных загружателей при наличии прямой механической связи;
- электродистанционное управление (Fly-by-Wire/ЭДСУ)

Здесь много интересной информации по теме Fly-by-Wire
В отличии от классической схемы, где прямая механическая связь (пусть даже через отдельные преобразователи) является правилом, в случае Fly-by-Wire данная связь отсутствует (сейчас опустим тонкости типа управления RUDDER’ом или HORIZONTAL STABILIZER’ом напрямую в режиме MECHANICAL BACKUP, это точно тема для отдельной статьи). Т.е. управляющее воздействие на сайдстик (Airbus) или штурвал (Boeing 777) оцифровывается и передается на FLIGHT COMPUTERS. Кстати, в Airbus их – аж целых 7: 2 ELAC’а (Elevator Aileron Computer), 3 SEC’а (Spoilers Elevator Computer), 2 FAC’а (Flight Augmentation Computer). Далее, исходя из закона управления (FLIGHT CONTROL LAW в терминологии Airbus) и множества других параметров полета, компьютеры выдают сигнал на отработку соответствующих гидроприводов, через которые управляющее воздействие передается аэродинамическим поверхностям.
К чему я это все рассказал: посадка на самолетах с Fly-by-Wire по технике выполнения очень похожа на то, что мы делаем на классических самолетах, но она имеет определенные особенности, о которых необходимо знать. Более подробно мы все это затронем ниже.
Интересные факты
Подготовка к посадке на эшелоне
Итак, мы летим на крейсерском эшелоне, при подлете к аэродрому назначения примерно за 200 с небольшим миль по VHF радиостанции можно услышать информацию ATIS (Automatic Terminal Information Service) аэродрома назначения. Принимаем погоду, далее с помощью специального программного обеспечения от Airbus, размещенного на бортовых iPad’ах (они же EFB — Electronic Flight Bag), проверяем погоду на предмет соответствия нашим landing performance, в частности соответствия расчетной посадочной дистанции располагаемой длине полосы с учетом текущих погодных условий и коэффициента сцепления на полосе и имеющихся отказов оборудования. Airbus 320 семейства имеет ограничения как по попутному ветру для взлета/посадки, так и по боковому. При этом боковая составляющая ветра с учетом порывов не должна превышать значения, внесенные в AFM (Aircraft Flight Manual, оно же РЛЭ – Руководство по летной эксплуатации) при сертификации самолета. Кроме этого, могут быть дополнительные ограничения в аэропорту назначения/запасным, которые находятся в NOTAM’ах (NOTice To AirMan) – эдакая пачка бумаги, которая обязательно выдается перед вылетом экипажу.
Кроме этого, погодные условия на аэродроме должны соответствовать минимуму самолета, экипажа и аэродрома. Если говорить простым языком, то минимум это минимально допустимые значения дальности видимости на полосе и высота облачности над ней (профессионалы, молчать!) Кому интересно – на том же SKYbrary есть очень много статей, рассказывающих про минимумы и их применение.
Сама подготовка включает в себя внесение в FMGS (Flight Management Guidance System, на Airbus их 2) через мини-клавиатуру с дисплеем MCDU (Multipurpose Control and Display Unit) схем прибытия (STAR, STandard ARrival) и самого захода (Approach, обычно это одна из инструментальных схем захода – например заход по ILS, Instrument Landing system), погоду в аэропорту назначения (давление QNH, температура, ветер) и минимума для соответствующего типа захода.

MCDU
При этом схема захода берется автоматически из базы FMGS (которая обновляется техническим составом раз в 24 дня на каждом самолете) и обязательно полностью проверяется на соответствие аэронавигационным сборникам. Наша авиакомпания использует сборники фирмы Jeppesen, которые также размещены в электронном виде на бортовых EFB:

iPad, прибитый к самолету

Или более жесткий вариант. Спасибо lx_photos
После того, как один из пилотов внес данную информацию, второй проводит проверку внесенных в FMGS данных (crosscheck – это одно из основных правил в авиации). Далее пилот, проводивший подготовку к посадке, зачитывает брифинг. Основная задача брифинга – рассказать об особенностях захода на посадку и ее выполнения, схемы руления после посадки, уход на второй круг. Особое внимание – при категорированных заходах по CAT II/CAT III (заходах с очень низкими минимумами, требующих выполнения специальных процедур) и действиям в случае отказа бортового оборудования в процессе захода или имеющихся отказах на борту самолета. NOTAM’ы со всеми ограничениями разбираются здесь же. После разбора всех имеющихся вопросов мы готовы к посадке, осталось дождаться подхода к точке начала снижения, которая также рассчитывается автоматически исходя из внесенных в FMGS данных.
Интересные факты
Снижение и заход на посадку
По своей сути весь процесс полета – это процесс управления энергией. Химическая энергия топлива преобразуется через тягу двигателей и подъемную силу в кинетическую энергию движения самолета и его потенциальную энергию по мере набора высоты, что в сумме дает общую энергию. При снижении – мы наблюдаем обратный процесс, когда вся накопленная энергия расходуется через аэродинамику и снижение высоты таким образом, чтобы получить посадочную скорость и заданную высоту к моменту пролета торца полосы. Исходя из вышесказанного и с учетом отдельных ограничений по скорости/высоте пролета отдельных точек на схеме STAR, ветра, FMGS вычисляет TOD (Top Of Descend, точка начала снижения).
Снижение на самолетах семейства Airbus может выполняться в двух режимах: MANAGED и SELECTED. В первом режиме самолет при помощи автопилота (AP, Autopilot) и автомата тяги (A/THR, Autothrust) сам пытается выдержать профиль снижения с учетом всех ограничений выбранной схемы прибытия, пилоты только контролируют то, что делает автоматика. Это не всегда удается, так как кроме профиля и скоростей, посчитанных FMGS, есть параметры, задаваемые диспетчером. Но в любом случае задание высот и перевод самолета на снижение – это ответственность PF. Для этого в самолете есть FCU (Flight Control Unit) – эдакая панель управления автопилотом самолета:

FCU с красивой подсветкой. Второй автопилот и автомат тяги включен
В режиме SELECTED – пилоты сами управляют автопилотом задавая режимы его работы. Типичные параметры – задача вертикальных и поступательных скоростей, так же довольно часто используется векторение (полет по курсу, заданному диспечером).

Грозовые очаги, как их видят пилоты на ND (Navigation display)
Интересные факты
Выполнение посадки
Еще небольшое лирическое отступление касательно систем захода на посадку: они бывают точные (в первую очередь это ILS, GLS — GBAS Landing System) – это заходы с вертикальным наведением и неточные (NDB – Non Directional Beacon, он же заход по приводам, VOR, RNAV и т.д.) – это заходы без такового наведения. Для каждого из типа захода на посадку есть т.н. GUIDANCE MODE — по сути режим работы FMGS, который обеспечивает заход самолета на посадку с учетом выбранного типа захода. При этом GUIDANCE MODE может обеспечивать точное наведение самолета по курсу и глиссаде (режимы LOG GS или FINAL APP) так и наведение только в одной плоскости (режимы LOC FPA или NAV FPA) или полностью ручное наведение самолета по заданному курсу/углу снижения (режим TRK FPA). Если суммировать сказанное, то точные заходы — более просты с точки зрения поддержки бортовой автоматикой, неточные — требуют дополнительного контроля как профиля, так и курса захода на посадку, что так же требует дополнительных усилий при заходе. Точные заходы позволяют осуществлять посадку при более низких минимумах, чем неточные.
В свою очередь, точные заходы делятся по так называемым категориям: CAT I, CAT II, CAT III A/B/C с соответствующим минимумом. На бывшей территории Советского Союза наличие ILS в аэропортах было раньше непозволительной роскошью, что не позволяло осуществлять заходы при более низких минимумах (чем точнее система захода – тем ниже минимум аэропорта). Но сейчас почти все большие аэропорты севернее Томска имеют ILS. Заход по приводам на старой технике это было еще то искусство полета… Для примера: если взять всю маршрутную нашей авиакомпании в России – только 22 аэропорта оборудованы системой ILS для захода по II категории и только 5 – для захода по IIIA.
Переводим самолет на снижение, зачитываем LANDING чеклист, получаем от диспетчера разрешение на выполнение посадки. При этом диспетчер обязательно сообщит текущий ветер, если он выходит за наши ограничения – то уходим на второй круг. Почти любое срабатывание сигнализации об отказах ниже 1000 футов над полосой в отсутствии визуального контакта с полосой – тоже уход на второй круг.
В 99% в нашей авиакомпании посадка выполняется в ручном режиме. Исключения: категорированные заходы при низких минимумах (CAT II/CAT III), где автоматический заход желателен/необходим. Так же все самолеты семейства Airbus 320 умеют выполнять процедуру Autoland с последующим rollout’ом (автоматическая посадка с последующей остановкой на полосе, с выдерживанием направления пробега используя курсовой маяк системы ILS). Для выполнения данной процедуры еще более жесткие ограничения по ветру, состоянию ВПП, работоспособности бортовых и наземных систем. Как это выглядит вживую:
Буквально три слова про уход на второй круг – в реальной жизни это бывает не так часто, но из-за редкости выполнения и скоротечности самого процесса требует повышенного внимания со стороны экипажа и особенно PM'a. Самое главное здесь – выдержать все ограничения по скоростям, высотам и тангажу при уходе с небольших высот – риск tailstrike высок как никогда. В зависимости от причины ухода на второй круг можно выполнить либо повторный заход, либо уйти на запасной аэродром.
Интересные факты
После посадки и до выключения на стоянке
А вот именно здесь, экипаж отдышавшись после выполнения посадки и освобождения полосы, выполнив необходимые процедуры с последующим AFTER LANDING чеклистом, переходит на частоту руления и узнает дальнейший маршрут движения по аэродрому. Обычно это длинная тирада с номерами рулежек, пересечений иногда с частотами для перехода и командами на ожидание в определенных местах. Главное здесь – все записать, повторить всю эту тираду диспетчеру и найти на схеме аэродрома, где находятся все эти рулежки.
Вот здесь на видео с 6 минуты видно, что из себя представляет схема руления в приложении Jeppesen Mobile Flight Deck:
Так же все рулежки, полосы и и.д. в аэропорту имеют специальную разметку, которая позволяет ориентироваться как в дневное, так и в ночное время. Самое главное здесь – контролировать маршрут руления по всем этим знакам и в случае малейших сомнений – переспрашивать диспетчера. Самолет заднего хода не имеет, поэтому если вы заблокируете рулежку или выедете на рабочую полосу без разрешения диспетчера (Runway Incrusion, что само по себе является серьёзным авиационным инцидентом) то вас просто не поймут.
Подъезжаем к гейту, здесь обычно нас встречает либо система типа SafeDock (моя любимая и наверное, самая распространенная), либо специально обученный человек в оранжевой/зеленой жилетке, который при помощи жезлов заводит нас на стоянку.

Процесс заруливания в исполнении системы SafeDock
Скажу сразу, используемые маршалом сигналы являются стандартными во всем мире и описаны в одном из документов ICAO. Таким образом мы (пилоты) можем понять, что от нас хотят с земли.
Любой полет в сложных метеоусловиях связан с пробиванием облачности и заходом на посадку по приборам. Этот этап полета является наиболее сложным и ответственным в самолетовождении.
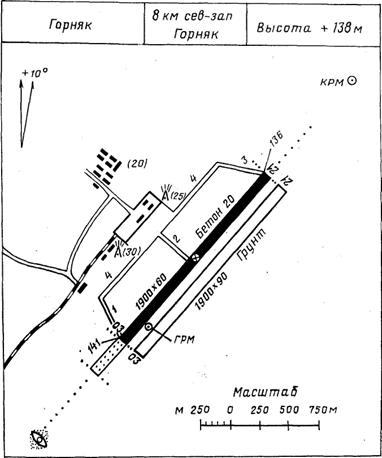
Рис. 22.1. Кроки аэродрома (аэродром условный)
При выполнении маневра снижения и захода на посадку в сложных метеоусловиях экипаж использует специальное бортовое оборудование самолета и наземные системы посадки. В настоящее время многие аэродромы гражданской авиации оборудованы современными системами посадки, а некоторые типы самолетов — системами автоматического захода на посадку.

В Сборнике для каждого аэродрома помещены:
кроки аэродрома;
схемы снижения и захода на посадку в плане и в профиле;
схемы выхода из района аэродрома после взлета;
минимумы для взлета и посадки воздушных судов по ППП и ПВП для каждого типа воздушного судна, посадочного курса и системы посадки;
схемы воздушных зон крупных центров страны.
На кроки аэродрома (рис. 22.1) нанесены: привязка аэродрома к ближайшему крупному пункту с указанием направления и расстояния, взлетно-посадочные полосы с указанием типа покрытия и размеров их в метрах, номера ВПП, контрольная точка аэродрома (КТА) с указанием превышения ее над уровнем моря (превышение КТА указывается вверху, в заглавии), превышение порогов (торцов ВПП) над уровнем моря, концевые и боковые полосы безопасности и их размеры в метрах, рулежные дорожки (РД) и их номера, перрон, аэродромные и другие сооружения, местоположение радиотехнических и светотехнических средств посадки.
На схемы снижения и захода на посадку (рис. 22.2) в плане нанесены:
магнитные путевые углы на всех участках маневра;
время полета на отдельных участках для штилевых условий;
курсовые углы радиостанций от основных точек маневра, азимуты и дальности от радиомаяка РСБН до основных точек маневра;
прямоугольные координаты основных точек маневра для применения автоматических систем захода на посадку;
высоты полета самолетов по давлению 760 мм рт. ст. и относительно уровня аэродрома в основных точках маневра (высоты полета относительно уровня аэродрома указываются в скобках);
МПУ подхода к точкам вписывания в схему;
высота аэродрома относительно уровня моря и безопасная высота полета в зоне взлета и посадки (МБВ);
высоты местности и высоты препятствий относительно КТА аэродрома (указываются в скобках);
места установки БПРМ, ДПРМ, радиомаяков РСБН и других средств обеспечения захода на посадку;
характерные линейные и площадные ориентиры;
магнитное склонение;
ограничительные пеленги (МПС), рубежи ограничений и запрещений.
Для схем захода приняты следующие обозначения выполнения маневров: маневр подхода в район вписывания в схему по приборам на эшелоне нанесен сплошной линией, со снижением (по кратчайшему пути) —двумя точками и тире, маневр внеочередного выхода на посадку из зоны ожидания—одной точкой и тире, маневр визуального захода на посадку — пунктирной линией.
На схеме в профиле (см. рис. 22.2) нанесены:
линии подхода, маневр снижения и захода на посадку с указанием времени полета на отдельных участках;
исходная высота начала маневра;
высота и эшелон перехода;
естественные и искусственные препятствия в секторе подхода с указанием их высоты относительно уровня аэродрома.
На схеме в профиле также указаны высоты подхода, входа в глиссаду, пролета приводных радиостанций и других контрольных точек схемы снижения и .захода на посадку, удаления ДПРМ и БПРМ от торца ВПП, их частота и позывные, угол наклона глиссады (УНГ).
Необходимые для полета сборники выдаются экипажу на борт перед полетом. В каждом аэропорту, кроме рабочих, имеются контрольные сборники. В период предварительной и предполетной подготовки к полету штурман самолета обязан проверить правильность внесения изменений в рабочий сборник по контрольному сборнику. Без сверки полученного экипажем бортового экземпляра сборника с контрольным экземпляром выпускать экипаж в полет запрещается.
Заход на посадку с прямой является самым экономичным способом и применяется для всех воздушных судов, когда рельеф местности и воздушная обстановка позволяют снижаться с маршрута визуально (по ПВП) на высоту, равную высоте входа в глиссаду на расстоянии 25—30 км до ВПП (рис. 22.3).
При непрерывном радиолокационном контроле за движением воздушных судов в процессе снижения заход на посадку с прямой допускается также и при невидимости пролетаемой местности (по ППП).
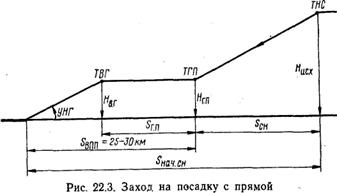
Заход на посадку с прямой применяется, когда направление подхода к аэродрому совпадает с направлением посадки или отличается от него в точке начала горизонтального полета на угол не более 45°.
В горной местности воздушные суда выводятся на ДПРМ (БПРМ, ОПРС) на безопасном эшелоне с последующим их снижением по установленной схеме захода на посадку.
Для захода на посадку с прямой командир воздушного судна по указанию диспетчера занимает исходную высоту начала снижения на расстоянии 80—100 км до аэродрома посадки. Снижение с исходной высоты выполняется на скорости не более 460 км/ч по прибору и вертикальной скоростью 5—10 м/сек с расчетом подхода к аэродрому за 25—30 км на высоте горизонтального полета, равной высоте входа в глиссаду (режим полета указан применительно к самолету Ан-24).
При достижении заданной высоты скорость полета постепенно уменьшается до 300 км/ч по прибору. Затем выпускаются шасси и закрылки и выполняется маневр выхода на предпосадочную прямую.
После входа в глиссаду самолет переводится в режим снижения с расчетной вертикальной скоростью и скоростью планирования 210—200 км/ч по прибору в зависимости от полетного веса. ДПРМ и БПРМ должны быть пройдены на высотах, указанных в схеме для данного аэродрома.
Заход на посадку по малому прямоугольному маршруту (рис. 22.4) применяется, когда в районе аэродрома посадки нет других воздушных судов, препятствующих подходу к аэродрому на снижении, или когда невозможен заход на посадку с прямой.
Для захода на посадку по малому прямоугольному маршруту самолет подводится к аэродрому с посадочным курсом или близким к нему. После выхода на ДПРМ (БПРМ) на исходной высоте начала маневра для захода на посадку выполняется разворот на 180° со снижением и самолет выводится на курс, обратный посадочному. Скорость по прибору выдерживается не более 460 км/ч, вертикальная скорость снижения — 8—10 м/сек.
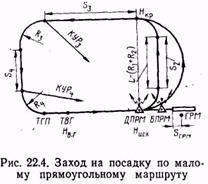
В процессе разворота при достижении высоты полета по кругу скорость полета уменьшается до 300 км/ч по прибору. На траверзе ДПРМ выпускаются шасси, и полет продолжается к точке третьего разворота на скорости 280—300 км/ч в течение времени, установленного согласно данной схеме. По истечении времени или при КУР = КУР3 выполняется третий разворот на скорости 280 км/ч по прибору с креном 15°. После третьего разворота самолет следует под прямым углом к предпосадочной прямой. По команде выпускаются закрылки на 15°, устанавливается скорость 250 км/ч по прибору и на этой скорости при КУР = КУР4 выполняется четвертый разворот на посадочный курс с креном 15°. До входа в глиссаду закрылки довыпускаются на угол 38°. После входа в глиссаду снижение выполняется аналогично снижению при заходе на посадку с прямой.
В ряде случаев для захода на посадку по малому прямоугольному маршруту самолет Ан-24 выводится на ДПРМ на установленной высоте полета по кругу. Так как далее самолет должен следовать по прямоугольному маршруту на скорости около 300 км/ч, то после выхода на ДПРМ необходимо: выполнить первый разворот с креном 15°; после окончания первого разворота пройти в направлении, перпендикулярном направлению посадки, в течение расчетного времени t2; выполнить второй разворот на курс, обратный посадочному; далее завершить полет по прямоугольному маршруту, как указано выше. В тех случаях, когда самолет выводится на аэродром с курсом, отличающимся от посадочного более чем на 45°, выполняется дополнительный маневр для вписывания в схему малого прямоугольного маршрута. Порядок выполнения дополнительного маневра указывается на схемах.
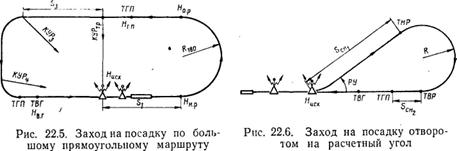
Заход на посадку по большому прямоугольному маршруту применяется, когда выход к аэродрому ограничен высотой подхода по условиям рельефа, интенсивностью воздушного движения и метеоусловиями. Основой для построения этой схемы захода на посадку служит малый прямоугольный маршрут.
Началом маневра является ДПРМ, выход на который производится в нижнем воздушном пространстве на эшелонах, расположенных выше исходной высоты для малого прямоугольного маршрута (рис. 22.5). После выхода на ДПРМ самолет с посадочным курсом переводится в режим снижения с вертикальной скоростью 8—10 м/сек и скоростью по прибору не более 460 км/ч. Полет от ДПРМ продолжается в течение установленного времени до высоты начала разворота на 180°. По истечении указанного в схеме времени выполняется разворот на 180° с сохранением прежней скорости по прибору и вертикальной скорости снижения.
После разворота на курс, обратный посадочному, продолжается снижение с сохранением прежнего режима до высоты полета по кругу. По достижении этой высоты снижение прекращается и самолет переводится в режим горизонтального полета с погашением скорости по прибору до 300 км/ч. От траверза ДПРМ заход выполняется аналогично заходу на посадку по малому прямоугольному маршруту.
Заход на посадку по большому прямоугольному маршруту можно выполнять и при выходе самолета к аэродрому с курсом, обратным посадочному, или под углом к ВПП. В этом случае указывается вспомогательная точка, от которой выполняется маневр выхода на ДПРМ для входа в схему захода на посадку.
Заход на посадку отворотом на расчетный угол применяется, когда самолет подходит к аэродрому с курсом, обратным направлению посадки, или близким, к нему, а рельеф местности или другие ограничения не позволяют выполнять снижение в направлении к траверзу ДПРМ.
Заход на посадку отворотом на РУ выполняется в такой последовательности:
1. Самолет выводится на ДПРМ на исходной высоте, указанной в схеме (рис. 22.6).
2. В момент пролета ДПРМ выполняется отворот на расчетный угол. Курс после отворота и время полета до разворота на посадочный курс указываются на схеме захода.
3. По истечении заданного времени полета выполняется разворот на посадочный курс.
4. Снижение самолета начинается с момента пролета ДПРМ и продолжается до выхода на высоту горизонтального полета, равную высоте входа в глиссаду.
5. После выхода на посадочный курс заход выполняется аналогично заходу на посадку с прямой.
Заход на посадку стандартным разворотом (22.7) применяется, когда направление подхода к ДПРМ отличается от курса, обратного посадочному, на угол не более 45°, а рельеф местности и другие ограничения не позволяют выполнять заход на посадку по другим схемам.
Заход на посадку стандартным разворотом выполняется в следующем порядке:
1. После выхода на ДПРМ на исходной высоте, равной высоте входа в глиссаду, берется курс, равный обратному посадочному. С этим курсом самолет следует в горизонтальном полете в течение установленного времени, указанного в схеме.
2. По истечении установленного времени выполняется указанный в схеме стандартный разворот.
3. После выхода из разворота на посадочный курс полет выполняется горизонтально в течение 60 сек до точки входа в глиссаду.
4. После входа в глиссаду дальнейший заход выполняется аналогично заходу с прямой.
Заход на посадку с обратного направления (рис. 22.8) применяется на аэродромах, оборудованных радиотехническими средствами посадки только с одного (основного) направления, когда по воздушной или наземной обстановке выполнить посадку с этого направления невозможно. В этом случае снижение на высоту круга осуществляется по любой из установленных схем. Дальнейший заход на посадку выполняется визуально с обратного направления по прямоугольному маршруту или стандартным разворотом.
Читайте также: