
На каком виде работ применяется беспетлевой поворот агрегата на 90 градусов на посеве
Обновлено: 05.10.2024
После определения состава МТА важнейшее условие его высококачественной и эффективной работы — правильная наладка как отдельных машин, так и агрегата в целом с учетом особенностей выполняемого технологического процесса в заданных условиях.
Способы наладки машин и агрегатов для выполнения всех основных операций подробно освещены в соответствующих дисциплинах по тракторам и сельскохозяйственным машинам, поэтому далее кратко рассмотрены только общие принципы организации и проведения этих работ. Часть работ по наладке машин и агрегатов сначала приводят с трактором, сцепкой и рабочими машинами раздельно, а другую часть — в составе агрегата, в том числе и не-посредственно в полевых условиях.
Основные виды наладочных работ по подготовке трактора к выполнению различных видов работ.Устанавливают требуемую ширину колеи трактора, а также шины требуемого профиля в зависимости от ширины междурядий. Подбирают также соответствующее давление в шинах. Настраивают прицепное и навесное устройства для агрегатирования соответственно прицепных и навесных машин.
Например, у тракторов общего назначения ДТ-75М, Т-150,Т-150К для работы с плугом навесной механизм собирают по двухточечной схеме при жестком соединении общих частей раскосов.
Такая схема обеспечивает свободный поворот трактора относительно продольной оси на 30° влево и вправо, исключая большие перегрузки в звеньях навесного механизма, которые могли бы привести к их поломке.
Трехточечную схему Навески на указанных тракторах с телескопическим соединением раскосов применяют для работы с широкозахватными машинами, обеспечивающими копирование рельефа поля. При недостаточном сцеплении движителей с почвой, а также для улучшения устойчивости и управляемости на колесные тракторы можно навешивать балластные грузы, закачивать в шины воду или другую жидкость,. Применяют также полугусеничный ход и дополнительные почвозацепы. Для более точного вождения широкозахватных агрегатов на тракторы устанавливают следоуказатели — перекидные штанги с отвесами и т. д., а также ог-раничитель хода штока гидроцилиндра. трактора, например для поддержания требуемой высоты среза при работе косилок и жатвенных машин.
Основные виды наладочных работ по подготовке сцепок.Прежде всего размечают брус сцепки для обеспечения симметричного расположения машин относительно продольной оси трактора. Если число машин четное, то от середины бруса в обе стороны откладывают половину ширины захвата одной машины и к полученным точкам присоединяют машины. Затем каждую следующую машину присоединяют к брусу сцепки на расстоянии, равном ширине ее захвата. При нечетном числе машин первую из них присоединяют к середине бруса Сцепки, а последующие — в обе стороны с шагом, равным ширине захвата одной машины. Если применяют эшелонированное расположение машин с использованием удли-нителей (сцепки типа СП-16), то в первом ряду располагают большее число машин, чтобы уменьшить потребность в удлинителях и облегчить поворот агрегата. Соответствующие рекомендации имеются и для других типов навесных и прицепных устройств, показанных на рисунках 5,1, 3.2.
Наладка рабочих машин.Для наладки рабочих машин проводят следующие основные виды работ по настройке для качественного выполнения различных технологических процессов: установка рабочих органов на заданную глубину обработки почвы или на требуемую высоту среза растений; установка вспомогательных устройств типа дискового ножа и предплужника на плуге; расстановка рабочих органов по ширине захвата; установка маркеров для обеспечения требуемой ширины стыковых междурядий; настрой-ка на заданную норму высева семян или внесения удобрений и средств защиты растений и т. д.
Требуемую глубину обработки почвы для большинства орудий (плугов, культиваторов и т. д.) устанавливают на специальной регулировочной площадке, подкладывая бруски требуемой толщины с учетом усадки почвы под опорные колеса при горизонтальном положении рамы машины.
Высоту среза растений регулируют опорными башмаками, а также ограниче-нием хода штока подъемного гидроцилиндра. Рабочие органы по ширине захвата (лап культиватора, сошников сеялки и др.) расстанавливают с помощью разметочной доски на регулировочной площадке при горизонтальном положении рамы машины. Норму высева семян, дозу внесения удобрений и т. д. устанавливают с помощью соответствующих механизмов. Как известно, норму высева семян у зерновых сеялок регулируют за счет длины активной части высевающей катушки при прокручивании приподнятых ходовых колес.
Схема определена длины вылета маркера показана на рисунке 3.3.


Длиной вылета маркера в общем случае называют проекцию расстояния от середины следа крайнего рабочего органа машины до следа маркера (у дисковых сеялок — расстояние от крайнего диска до следа маркера). Число маркеров на агрегате зависит от принятого способа движения: два — при челночном способе, один — при способе движения вразвал. Длина вылета маркера зависит как от ширины захвата агрегата, так и от способа вождения трактора относительно следа маркера.
Для удобства расчета сначала рассмотрим случай вождения трактора по следу маркера серединой (пробкой радиатора), как показано на рисунке 3.3.Длины вылета пра-вогои левого маркеров в этом случае равнымежду собой и всоответствии с рисунком 3.3


Так как ширина захвата посевного агрегата связана с соотношением , то равенство (3.22) примет вид

= =0,5(В+m)
Практически для тракториста удобнее вождение трактора по следу маркера серединой правого колеса или краем правой гусеницы. В этом случае для и с учетом формулы (3.33) соответственно получим


Если вести трактор по следу маркера попеременно правым и левым колесом (гусеницей), то определяемые по формуле (3.34) . Если для многомашинных агрегатов длина вылета маркера получается слишком большая, то рекомендуют использовать следоуказатель с отвесом в виде легкой перекидной штанги, укрепля-емой перед радиатором. Длины вылета обоих маркеров в этом случае равны и с учетом формулы (3.33) их определяют из равенства


Длина следоуказателя равна расстоянию от продольной оси трактора до нити отвеса. Следует, однако, отметить, что в процессе работы отвес раскачивается, поэтому трактористу сложно пользоваться следоуказателем.
Наладочные работы для всего агрегата.Эти работы сводятся в основном к проверке соблюдения установленных раздельно на тракторе, сцепке и рабочих машинах регулировок непосредственно в полевых условиях. Например, при рабочем ходе агрегата для соблюдения установленной глубины обработки почвы должно быть обеспечено горизонтальное положение рамы навесной машины за счет изменения длины центральной тяги. Может потребоваться и уточнение глубины обработки почвы при неточном учете усадки почвы.
Для посевных и посадочных машин, а также для машин по внесению удобрений и средств защиты растений проверяют точность соблюдения установленной нормы высева или методом контрольного высева. Для этого в технологическую емкость машины засыпают предварительно взвешенное контрольное количество семян или у
ОСНОВНЫЕ ВИДЫ ПОВОРОТОВ МТА
Движение МТА в процессе работы чаще состоит из прямолинейных рабочих ходов и холостых поворотов с выключенными рабочими органами. Однако при круговом способе движения МТА может совершать повороты также и без выключения рабочих органов.
Повороты — наиболее сложный элемент кинематики агрегатов, поэтому при выборе вида поворота необходимо учитывать высокое качество выполняемой работы; возможно меньшую ширину поворотной полосы и длину холостого пути агрегата; меньшие потери времени и топлива на холостые повороты; обеспечение безопасных условий работы; меньшее отрицательное воздействие на окружающую среду, особенно на почву. Все виды поворотов МТА для удобства изучения делят на петлевые и беспетлевые, а также по углу поворота —на 90 и 180°. Наиболее широко на практике применяют повороты МТА, представленные на рисунке 4.4. Повороты а, б, д, е, ж, з совершаются на 180°, а в и г — на 90°.
Важнейшие кинематические характеристики всех видов поворотов — длина , радиус поворота , а также ширина поворотной полосы '. Под и при этом подразумевают их минимальные возможные значения с учетом изложенных ранее требований. Длина поворота , как видно из рисунка 4.4, равна длине траектории центра агрегата от точки начала поворота до точки его завершения , которая зависит от вида и радиуса поворота. Общую длину пути агрегата за время одного поворота

Минимальная ширина поворотной полосы зависит от и , а также от кинематической ширины агрегата .
Соответствующие зависимости для определения и применительно к представленным на рисунке 4.4 основным видам поворотов МТА приведены в таблице 4.1.
' Продолжительность одного поворота МТА, с,

Радиус поворота зависит от рабочей ширины захвата и скорости движения при повороте. При значениях до 1,4 м/с (5 км/ч) радиус поворота принимают пропорциональным ширине захвата агрегата :

Если vx больше 1,4 м/с, значение R, полученное из формулы (4.4),умножают на соответствующий поправочный коэффициент, принимая

| 4.2. Усредненные значен тель) агрегатов | ия aRo и аЯудля навесных (числитель) и прицепных (знамена- | |||
| Тип агрегата | "*, | vx, м/с | (км/ч) | |
| 1,4 | 1,94(7) | 2,5(9) | 3,33(12) | |
| Пахотные | 3/4,50 | 1,05/1,15 | 1,20/1,42 | 1,35/1,60 |
| Для предпосевной обработки | 0,90/1,40 | 1,06/1,12 | 1,32/1,55 | 1,46/1,75 |
| Посевные и посадочные (одно- двухмашинные) | 1,10/1,60 | 1,08/1,32 | 1,41/1,57 | 1,58/1,80 |
| Посевные (трех- и пятисеялочные) | 0,90/1,30 | 1,08/1,32 | 1,41/1,57 | 1,58/1,58 |
| Пропашные (культи-ваторные) | 0,80/1,20 | 1,06/1,35 | 1,34/1,68 | 1,48/1,85 |
| Косилочные | 0,90/1,20 | 1,09/1,30 | 1,46/1,62 | 1,52/1,82 |
| Жатвенные | 0,90/1,40 | 1,09/1,90 | 1,46/1,62 | 1,52/1,82 |
Длина выезда агрегата , как видно из формулы (4.1), прямо пропорциональна кинетической длине , которая, в свою очередь, возрастает с увеличением ширины захвата агрегата . Поэтому длину выезда МТА приближенно можно принять пропорциональной ширине захвата


При практических расчетах в зависимости от выполняемого процесса приближенно можно принять следующее значение :
| Вспашка | Лущение | Сплошная Боронование | Прокаты- | Посев зерно- |
| и дискование | междурядная культивация | вание | вых культуру | |
| 1,5 | 0,5 | 0,8 0,4 | 0,3 | 0,7 |
12.СПОСОБЫ ДВИЖЕНИЯ МТА
Способы движения МТА классифицируют по направлению рабочих ходов (гоновый, диагональный, круговой), способу подготовки обрабатываемого участка (загонный, беззагонный), виду поворота (петлевой, беспетлевой и т. д.), направлению поворота (право-поворотный, левоповоротный), числу одновременно обрабатывае-мых загонов (однозагонный, многозагонный).
Основной классификационный признак способа движения МТА — направление рабочих ходов, от которого непосредственно зависят показатели холостого хода агрегатов. Схемы основных способов движения МТА по направлению рабочих ходов показаны на рисунке 4.5.
При гоновых способах движения агрегат совершает прямолинейные рабочие ходы параллельно одной или двум сторонам загона с холостыми поворотами на обоих концах (рис. 4.5, а. ё). В зависимости от вида холостого поворота МТА гоновые способы движения подразделяют на петлевые (рис. 4.5, а. г) и беспетлевые (рис. 4.5, д, ё.)

Гоновой способ движения агрегата считают петлевым, если в процессе обработки загона совершается хотя бы один петлевой поворот (см. рис. 4.4).
Гоновой челночный способ движения (рис. 4.5, а) — один из самых распространенных благодаря своей простоте, и для него не надо разбивать поле на загоны. Этим способом выполняют подавляющее большинство операций: внесение удобрений; лущение стерни и дискование; плоскорезную обработку почвы; вспашку оборотным и фронтальным плугами; боронование при небольшой ширине захвата агрегата; сплошную культивацию; прикатывание почвы; посев и посадку сельскохозяйственных культур; междурядную обработку пропашных культур; уборку сельскохозяйственных куль-тур агрегатами с фронтальными рабочими органами, навешиваемыми на трактор спереди, и др.
Названия тоновых петлевых способов движения всвал, вразвал и чередование загонов всвал и вразвал (см. рис. 4.5, 6. г) связаны с вспашкой и, естественно, их чаще применяют на этой операции. Однако эти способы движения возможны и на некоторых других операциях, включая лущение стерни и дискование, боронова-ние, посев зерновых (непропашных) культур; уборку сельскохозяйственных культур и др. Чередуя способы движения всвал и вразвал при вспашке, почти в два раза уменьшается число свальных гребней и развальных борозд. При этом нечетные загоны обрабатывают в направлении слева направо всвал, а четные — в обратном направлении способом вразвал. При этом длина пути холостых переездов агрегата с одного загона на другой уменьшится. Гоновой беспетлевой комбинированный способ движения (см. рис. 4.5, д) при разных соотношениях между шириной попар-но равных частей загона С1 С2 чаще применяют на вспашке, а также на уборке картофеля и сахарной свеклы, где для громоздких и тяжелых машин нежелательны петлевые повороты. Беспетлевой способ движения перекрытием (рис. 4.5, е) чаще применяют на междурядной культивации.
При диагональном способе движения рабочие ходы агрегата совершаются под острым или тупым углом к сторонам загона (см. рис. 4.5, з). Возможны несколько вариантов диагональных способов движения: обработка загона от одного угла до противоположного (см. рис. 4.5, з); от диагонали загона поочередно к про-тивоположным углам; диагонально-перекрестный и т. д.
Диагональный способ движения рекомендуют применять на тех операциях, при выполнении которых агрегат должен двигаться под острым или тупым углом к направлению предшествующей обработки. К таким операциям относятся: лущение стерни и дискование, боронование, прикатывание почвы, узкорядный посев зер-новых культур.
При круговом способе движения МТА рабочие ходы совершаются вдоль всех четырех сторон загона без выключения рабочих органов, за исключением середины загона, где неизбежны несколько холостых петлевых поворотов. Различают круговые способы движения от периферии к центру (см. рис. 4.5, ж) и от центра к периферии в направлении, обратном первому варианту.
Круговой способ движения применяют на тех операциях, где возможен поворот агрегата без выключения рабочих органов: лущение стерни и дискование, боронование, прикатывание почвы, уборка наземной части урожая.
На практике более простым является движение агрегата от периферии к центру. Однако для сохранения животных и птиц при уборке трав и хлебов рекомендуют движение от центра к периферии, чтобы животные и птицы могли беспрепятственно уйти с обрабатываемого участка. Для этого необходима соответствующая предварительная подготовка полей — прокосы для первых проходов агрегатов.
Почти каждую операцию можно выполнять несколькими способами движения агрегата. Поэтому в зависимости от конкретных условий работы следует выбирать такой способ движения из возможных, при котором обеспечивается высокое качество работы при наименьших потерях времени смены, топлива и других ресурсов на непроизводительные холостые ходы агрегатов.
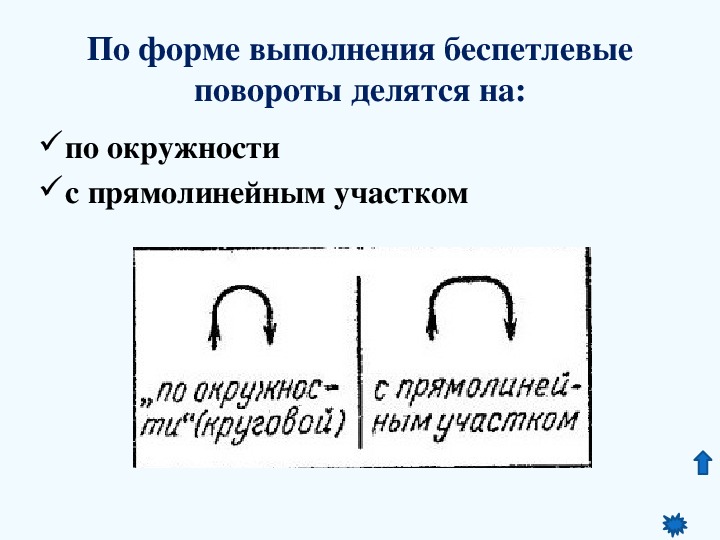
Повороты бывают петлевые и беспетлевые, а также на 180 0 , 90 0 и на произвольный угол.
Петлевой с открытой петлёй с использованием заднего хода
Петлевой с закрытой петлёй с использованием заднеего хода
Петлевые повороты применяются в том случае, если расстояние между смежными проходами агрегата меньше двух радиусов его поворота, т.е.
Безпетлевые повороты применяются в том случае, если расстояние между смежными проходами агрегата больше либо равно сумме двух радиусов его поворота, т.е.
где Х – расстояние между смежными проходами агрегата;
R0 – радиус поворота агрегата, м.
Преимущества и недостатки:
1. Наличие петли той или иной формы удлиняет траекторию поворота, а в ряде случаев значительно увеличивает и ширину поворотной полосы (грушевидный, восьмёркообразный, петлевой с открытой петлёй).
2. Отсутствие петли той или иной формы сокращает длину беспетлевого поворота по сравнению с петлевым и значительно уменьшает ширину поворотной полосы (беспетлевой с прямолинейным участком, беспетлевой дугообразный).
3. Петлевые повороты с задним ходом применимы только для движения агрегатов с навесными машинами и хотя для них не требуется широкая поворотная полоса, время поворота tП увеличивается вследствие двух дополнительных остановок трактора для переключения движения с переднего хода движения на задний и наоборот.
Возможность применения того или иного вида поворота зависит от выполняемой операции, условий работы, типа агрегата (ширина захвата, прицепной или навесной, наличие оборотных рабочих органов, реверса и т.д.) и др. факторов.
Главное условие выбора поворота – улучшение качества и технико-эксплуатационных показателей работы агрегата.
Классификация способов движения агрегатов по схеме обработки участка. Графическая иллюстрация.
Основными способами движения агрегатов по схеме обработки участка являются следующие:
- с чередованием загонов всвал-вразвал;
Всвал (гоновое правоповоротное движение, при котором загон (участок) обрабатывают от средней части к боковым сторонам (при вспашке в средней части образуется свальный гребень). Применяется в основном на вспашке, уборке картофеля и свёклы.
Вразвал (гоновое левоповоротное движение, при котором загон обрабатывают от боковых сторон к средней части (при вспашке в средней части образуется развальная борозда). Применяется в основном на вспашке, уборке картофеля и свёклы.
Беспетлевой комбинированный (движение на одном загоне осуществляется всвал и вразвал). Применяется на вспашке с целью уменьшения ширины поворотных полос, т.к. при этом способе все повороты – беспетлевые.
Челночный (загон обрабатывают последовательными, чаще всего рядом расположенными ходами с правыми и левыми поворотами). Это самый распространённый способ движения, не требующий тщательной подготовки поля к работе. Применяется на внесении удобрений, вспашке оборотными плугами, культивации, бороновании, посеве и посадке с.х. культур, уходе за растениями и уборке.Перекрытием (движение на загоне осуществляется параллельными ходами с беспетлевыми поворотами). Применяется в основном при посеве на небольших участках с длиной гона до 200 м
.
В данной работе рассмотрены особенности видов поворотов. Особое внимание уделено классификации видов поворотов : По углу изменения направления движения(90°;180°; По направлению движения(правые и левые); По способу выполнения Особенное внимание уделено рассмотрению поворотов по способу выполнения: Петлевого; Безпетлевого(по окружности и с прямолинейным участком); С задним ходом Зависимость скорости движения на поворотах от условий работы агрегата

Все повороты делятся на следующие виды: По углу изменения направления движения; По направлению движения; По способу выполнения В П
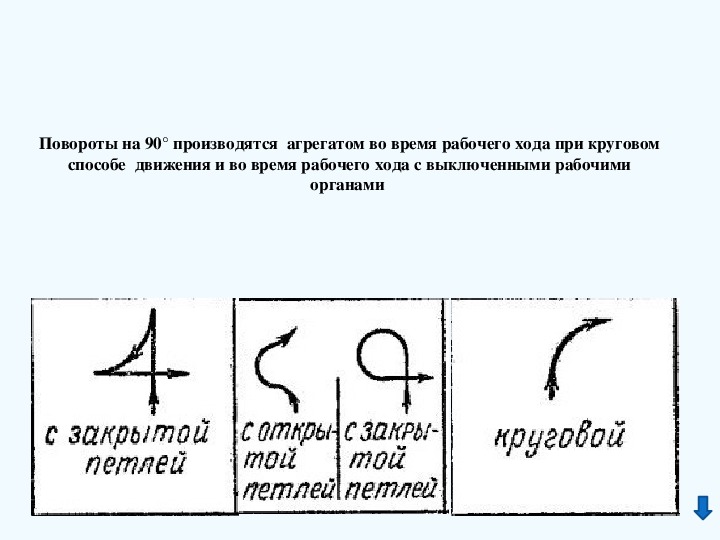
Повороты на 90° производятся агрегатом во время рабочего хода при круговом способе движения и во время рабочего хода с выключенными рабочими органами
Длина пути агрегата при повороте зависит от радиуса поворота. При повороте на 90° и установившемся движении агрегат проходит путь, примерно равный четверти окружности



Если расстояние между ними меньше двух радиусов, приходится делать петлевые повороты. Длина этого вида поворота больше длины беспетлевого (увеличивается длина холостого пути)
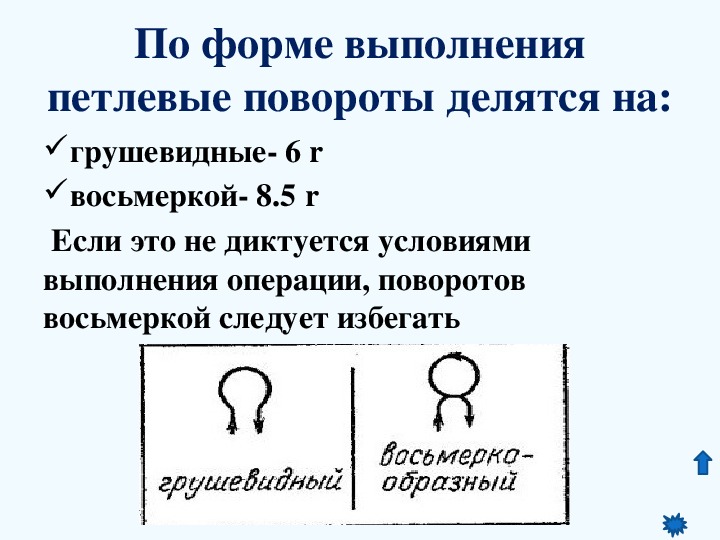
По форме выполнения петлевые повороты делятся на: грушевидные 6 r восьмеркой 8.5 r Если это не диктуется условиями выполнения операции, поворотов восьмеркой следует избегать
Длина беспетлевого поворота может быть определена по формуле: L= 1.14r+x, Где х расстояние между рабочими ходами; rрадиус поворота
Иногда при обработке одного участка применяют петлевые и беспетлевые повороты. Так, при вспашке загона всвал вначале делают петлевые. Когда ширина обрабатываемой полосы еще больше увеличиться, поворот будет состоять уже из двух поворотов на 90° и прямолинейного участка
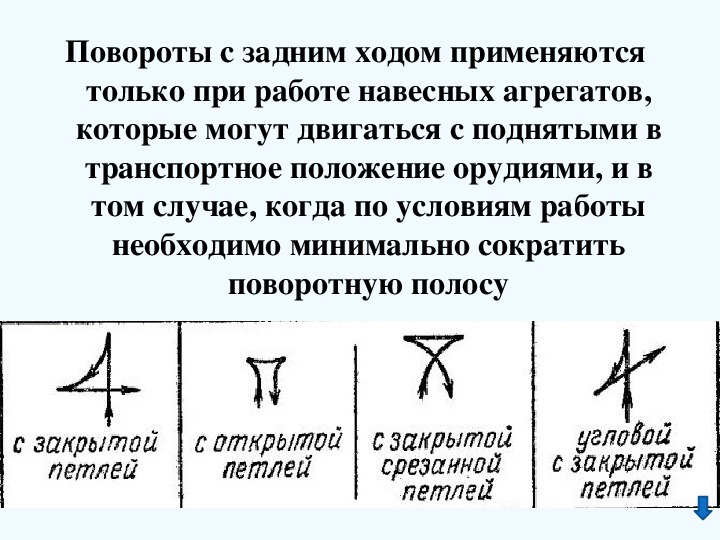
Повороты с задним ходом применяются только при работе навесных агрегатов, которые могут двигаться с поднятыми в транспортное положение орудиями, и в том случае, когда по условиям работы необходимо минимально сократить поворотную полосу
Ширина поворотной полосы и длина петлевых поворотов с задним ходом меньше, чем во втором. Поэтому на коротких гонах, если поворотная полоса находится внутри поля, следует работать с поворотами задним ходом, а на длинных гонах или если поворотная полоса находится вне поля, необходимо применять беспетлевые повороты. Если это невозможно, при выполнении операций как с прицепными, так и с навесными агрегатами работают с петлевыми грушевидными поворотами
Повороты агрегатов, как правило, производят с выключенными рабочими органами. Скорость движения на поворотах зависит от условий работы агрегата. Обычно скорость на повороте равна или несколько меньше рабочей
Движение машинно-тракторных агрегатов при обработке участков характеризуется определенной цикличностью. В каждый цикл входят рабочий ход и поворот для изменения направления движения на обратное или под некоторым углом к законченному рабочему ходу. К элементам движения агрегатов относятся также дополнительные заезды и переезды.
Способы движения МТА (рис.1) и виды поворотов (рис.2) зависят от вида выполняемой работы, предъявляемых агролесотехнических требований, конструктивных особенностей рабочих машин, систем соединения с трактором и других факторов.
При работе различных МТА на одной и той же обрабатываемой площади (особенно на вырубке) кинематика их отличается незначительно. Поэтому студенты в курсовой работе разрабатывают кинематику только одного агрегата из числа применяемых в технологической карте.
Студенты должны выбрать способ движения агрегата и вид поворота и в зависимости от основных кинематических данных агрегата определить длину холостого хода (Lх.х) одного поворота агрегата и наименьшую ширину поворотной полосы (Е). Зависимость длины холостого хода одного поворота и ширины поворотной полосы от кинематических параметров агрегата и вида поворота приведены в таблице 2.
Влияние вида поворота на ширину поворотной полосы
и длину холостого хода МТА
| Виды поворота | Ширина поворотной полосы Е | Длина холостого хода Lх одного поворота агрегата |
| Беспетлевые: - круговой - с прямым участком - угловой | 1,1R+0,5В+l 1,1R+0,5В+l 1,1R+0,5В+l | (3,2…4,0)R+2l (1,4…2,0)R+X+2l (1,6…1,8)R+2l |
| Петлевые: - грушевидный - односторонний - закрытая петля | 2,8R+0,5В+l 2,6R+0,5В+l 2,0R+0,5В+l | (6,6…8,0)R+2l (6,0…7,5)R+2l (5,0…6,5)R+2l |
| Только с навесными орудиями: - с открытой петлей - с закрытой петлей - угловая петля - игольчатый | 1,1R+0,5В+l 1,1R+0,5В+l 1,2R+0,5lтр+l 1,2R+0,5lтр+l | (4,1…5,0)R+2l (5,0…5,5)R+2l (2,5…3,5)R+2l (2,8…4,0)R+2l |
Примечания: R – радиус поворота агрегата, м; В – ширина агрегата, м; l – длина выезда (въезда) агрегата, м; Х – длина прямого хода на поворотной полосе, м; lтр – длина трактора, м.

Рисунок 1. Основные способы движения МТА:
вразвал (а); всвал (б); чередованием способов всвал и развал (в); комбинированный (г); челночный (д); реверсивный (е); диагональный (ж); диагонально-поперечный (з); круговой (и); Е – ширина поворотной полосы
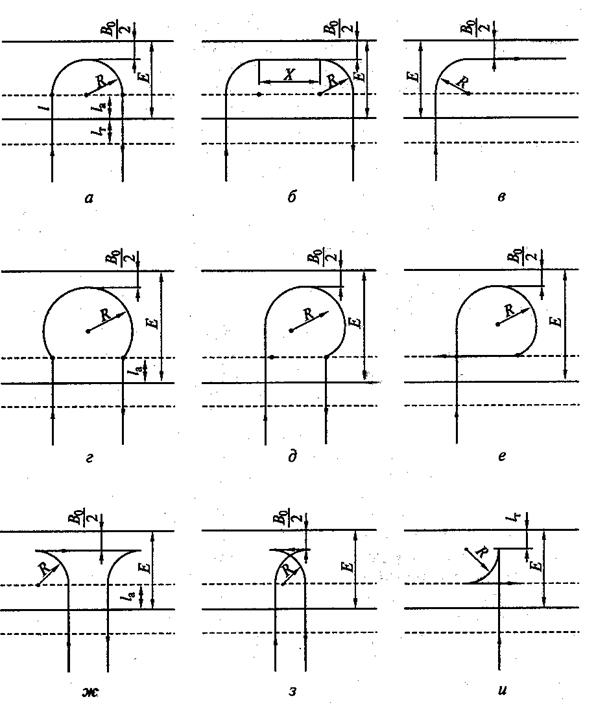
Рисунок 2. Основные виды поворотов лесохозяйственных агрегатов:
беспетлевые (а – круговой; б – с прямым участком; в – угловой); петлевые (г - грушевидный; д – односторонний; е – закрытая петля; ж – грибовидный с открытой петлей; з – грибовидный с закрытой петлей; и – угловая петля); Х – длина прямого хода на поворотной полосе; Во – ширина захвата лесохозяйственного агрегата; Е – ширина поворотной полосы; lа – длина агрегата; lт – длина трактора; R – радиус поворота
В практических расчетах радиус поворота принимается: для прицепных агрегатов с зубовыми боронами со сцепкой – равным ширине агрегата; с культиваторами, сеялками – 0,7-0,8 ширины МТА, в зависимости от числа машин в его составе. Для МТА с навесными рабочими машинами наименьший радиус поворота равен конструктивному радиусу поворота трактора.
При определении длины выезда агрегата (l), состоящего из колесного трактора и навешанных сзади рабочих машин, а также агрегатов с большим радиусом поворота принимают е = 0,1lк. Для агрегатов с прицепными машинами е = 0,5…0,75lк.
По направлению рабочих ходов различают три основные способа движения машинно-тракторных агрегатов: гоновые, комбинированные, челночные, реверсивные, диагональные и круговые.
При гоновых способах движения МТА выполняет рабочие ходы параллельно одной или двум сторонам рабочего участка с холостыми поворотами на обеих его концах. На прямоугольных участках с гоновым способом движения МТА наибольший эффект достигается при направлении гона агрегата по длинной стороне загона, так как в таких случаях уменьшается число поворотов.
К данной группе относятся способы движения МТА вразвал, всвал, чередование по загонам. Данные способы движения являются основными при основной вспашке лемешными многокорпусными плугами при обработке почвы в лесных питомниках, защитном лесоразведении. Основное преимущество способа чередования по загонам состоит в уменьшении числа свальных гребней и развальных борозд по сравнению с движением только всвал или вразвал.
Комбинированный способ движения позволяет уменьшить величину поворотных полос, повысить качество вспашки, уменьшить число развальных борозд. Этот способ применяется для частичной широкополосной обработке почвы для производства лесных культур, при защитном лесоразведении.
Челночный способ движения наиболее эффективен для простых одномашинных высокоманевренных МТА при выполнении таких операций, как частичная обработка почвы на вырубках, гладкая вспашка оборотными плугами на небольших участках лесных питомников.
Реверсивный способ движения применяется при выполнении механизированных работ в особо сложных условиях (лесоразведение на склонах и др.) при условии комплектования МТА с использованием тракторов, которые имеют фронтальные и задние навесные устройства для одновременного присоединения рабочих машин.
Диагональный способ движения применяется с целью достижения лучшего качества работ при бороновании, перекрестной междурядной культивации, когда рабочие ходы МТА необходимо выполнять под определенным углом к сторонам загона.
При круговом способе движения рабочие ходы совершаются без выключения рабочих органов вдоль всех четырех и более сторон рабочего участка. Круговые движения могут быть направлены от периферии к центру и, наоборот. В ряде случаев при изменении направления движения на угловых поворотах рабочие машины могут переводиться и в нерабочее положение.
Движение МТА в процессе работы на участке состоит из рабочих ходов и поворотов. При выборе вида поворота учитываются следующие требования: возможность его исполнения; соблюдение условий техники безопасности; достижение наибольшей производительности МТА и наименьшего расхода топлива, оставление возможно меньшей ширины поворотной полосы. Наиболее широко применяются на практике следующие группы поворотов: беспетлевые, петлевые и игольчатые.
Беспетлевые повороты делятся на три вида: круговой, поворот с прямым участком и угловой.
Из группы петлевых поворотов наиболее часто применяются грушевидный, односторонний и поворот с закрытой петлей.
Игольчатые повороты применяются при реверсивном способе движения МТА с фронтальной и задней навеской рабочих машин.
Читайте также: