
Посадка с обратным стартом
Обновлено: 05.10.2024
Способы инструментального захода на посадку изложены в документе 8168.
В международной практике наиболее часто применяются следующие способы инструментального захода на посадку:
1. Заход с прямой (Straight in Approach).
2. Обратная схема:
– стандартный разворот ( Procedure Turn ) ;
– обратный разворот ( Base Turn ).
3. Схема " Ипподром " (Race Track).
4. Заход по орбите ( Arc in Orbit ).
5. Векторение по локатору ( Vectoring Approach ).
Каждый из этих способов далее будет рассмотрен отдельно.
Особенности выполнения захода на посадку этими способами публикуются в полетных документах. Расчет схем захода на посадку производится с учетом индикаторных скоростей ВС на различных этапах захода. Выбор способов захода на посадку, а также их выполнение и публикация связаны со следующими правилами:
1. Все развороты при заходе на посадку должны выполняться с креном 25 ° (в США - 30 ° ) или с угловой скоростью 3 ° /сек.
2. Если на схеме обозначено положение посадочных устройств, но не обозначены курсы и время полета, нужно пользоваться данными для нормальной (стандартной) схемы.
3. Если на схеме не указаны посадочные устройства, курсы и время полета, заход выполняется по расчету экипажа, но так, чтобы максимальное удаление ВС от ВПП не превышало 15 морских миль.
4. Если на схеме обозначены курсы и время полета, заход на посадку выполняется строго по указанной схеме.
В случаях, когда экипаж ВС сообщает диспетчерской службе, что схема захода на посадку и порядок ее выполнения на данном аэродроме ему незнакомы, диспетчерская служба должна сообщить:
1. Установленную начальную высоту захода на посадку.
2. Место начала разворота, обычно в минутах полета от навигационной точки.
3. Высоту начала разворота.
4. Высоту выхода из последнего разворота.
5. Сведения о посадочной прямой.
Заход с прямой. Основной и самый экономичный способ захода на посадку. Разрешается при подходе ВС к посадочному курсу под углом не более 30 ° и удалении от торца ВПП не более 25 морских миль. При выполнении захода данным способом экипаж обязан строго выполнять команды диспетчерской службы, особенно в вертикальной плоскости, зная при этом минимальные безопасные эшелоны и высоты в районе данного аэродрома.
Стандартный разворот . Характерным для данного способа захода на посадку является возможность изменить направление полета на противоположное курсу посадки еще на начальном этапе схемы захода. Этод способ используется, когда линия пути удаления начинается от навигационного средства, установленного на аэродроме или вблизи него.
Схемы стандартного разворота могут быть левыми ( Procedure Tern Left ) или правыми ( Procedure Tern Right ). Название зависит от стороны начального отворота.
Существует два вида стандартного разворота:
1. Стандартный разворот 45 ° / 180 ° . Состоит из полета по заданной обратной линии пути с заданным временем полета (от 1 до 3 минут) от навигационного средства или контрольной точки, разворота на 45 ° в сторону от линии пути удаления, полета по прямой в течение 1 мин для воздушных судов категории А и В, или 1мин 15 сек для воздушных судов категории C,D и E с последующим разворотом на 180 ° для выхода на прямую приближения. Является альтернативой стандартному развороту 80 ° / 260 ° , если он не исключен специально. Наиболее удобен при использовании системы ILS, где последний разворот начинается в момент отшкаливания курсовой стрелки индикатора (НКП, КПП-М).
t = 1мин 15 сек (C,D,E)
Левый стандартный разворот 45 ° /180 °
45 ° /180 ° procedure tern left
1. Стандартный разворот 80 ° / 260 ° . Состоит из полета по заданной обратной линии пути с заданным временем полета (от 1 до 3 минут) от навигационного средства или контрольной точки, разворота на 80 ° в сторону от линии пути удаления с последующим разворотом на 260 ° в противоположном направлении для выхода на линию пути приближения. Является альтернативой стандартному развороту 45 ° / 180 ° , если он не исключен специально.
Левый стандартный разворот 80 ° /260 °
80 ° /260 ° procedure tern left
Обратная линия пути и (или) время полета по ней в обоих видах обратного разворота могут отличаться для разных категорий ВС. В этом случае публикуются отдельные схемы.
Обратный разворот на посадочный курс (углом отворота). Состоит из полета по указанной обратной линии пути и заданной длительности полета или расстояния по DME от навигационного средства с курсом, отличающимся от обратного посадочного на угол a , с последующим разворотом для выхода на линию пути приближения. Угол отворота a определяется по формуле a = 36 / t для ВС категорий А, В и a = 54 / t для ВС категорий C, D, E.
Обратный разворот на посадочный курс
Схема "Ипподром" (двумя разворотами на 180 ° ). Может иметь ту же конфигурацию, что и схема полета в зоне ожидания этого аэродрома, при соответствующих эксплуатационных скоростях и времени полета по прямой удаления.
Схема " Ипподром "
Racetrack procedures
Заход на посадку
Применяется в случаях, когда ВС прибывают, пролетая над контрольной точкой, с различных направлений (предполагается, что ВС будут входить в схему точно так же, как это предписывается в отношении входа в зону ожидания),и там, где расстояние прямолинейного участка не обеспечивает снижения до необходимой высоты, или когда нецелесообразно выполнять вход в обратную схему. Если продолжительность полета по схеме не обеспечивает снижения до необходимой высоты, может быть предусмотрено два или более полетов по этой схеме. Для повышения оперативной гибкости эта схема может применяться в качестве альтернативы обратным схемам (в этом случае она не обязательно публикуется отдельно).
Состоит из разворота от линии пути приближения на 180 ° после пролета навигационного средства или контрольной точки с выходом на обратную линию пути при длительности полета по этой линии в течение 1, 2 или 3 минут с последующим разворотом на 180 ° в том же направлении для возвращения на линию пути приближения. Вместо временного ограничения для полета по участку обратной линии пути, в качестве ограничения может использоваться расстояние по DME или пересекающий радиал (курс).
Особенностью этого способа является выход на линию пути удаления и полет по ней не от навигационного средства, поэтому необходимо выполнять определенные расчеты для выхода на линию пути удаления, особенно для определения момента разворота на прямую приближения.
Заход по орбите. Способ заключается в полете по окружности на определенной дальности по DME, со снижением до высоты не ниже указанной на схеме (обычно начальная высота выполнения схемы захода на посадку или высота входа в глиссаду), с целью вывода ВС в наивыгоднейшую точку разворота на прямую приближения с последующим полетом по прямой приближения для выполнения захода на посадку. Точка разворота на прямую приближения, как правило, маркируется радиалом от радионавигационного средства.
Векторение по локатору. Сущность этого метода заключается в том, что после пересечения границы или рубежа зоны векторения, экипаж ВС следует командам диспетчера, который сообщает требуемый курс полета и выводит, таким образом ВС в зону ± 30 ° от посадочного курса. После "захвата" сигнала курсового маяка, векторение прекращается.
ВИЗУАЛЬНЫЙ ЗАХОД НА ПОСАДКУ
(CIRCLE TO LAND)
Основным методом захода на посадку в международных аэропортах является инструментальный. Однако не на всех аэродромах, оборудованных устройствами для инструментального захода на посадку, имеются схемы захода на посадку по приборам. Особенностью визуального захода на посадку является то, при выполнении его схемы "коробочка" экипаж обязан видеть ВПП в процессе всего захода.
Визуальный заход на посадку и полет по прямоугольному маршруту типа "коробочка" применяется крайне редко. Термин "заход на посадку по кругу" вообще означает выполнение визуального полета по кругу над аэродромом перед посадкой.
Заход на посадку по кругу представляет собой визуальный маневр в полете. Условия полета по кругу каждый раз бывают различными, поскольку они зависят от таких переменных факторов, как расположение ВПП, линия пути конечного этапа захода на посадку, скорость ветра и метеорологические условия. Следовательно, невозможно разработать единую схему, которая была бы пригодна для выполнения захода на посадку по кругу в любых условиях.
После установления первоначального визуального контакта с ориентирами основное допущение заключается в том, что среду ВПП (то есть порог ВПП или светотехнические средства захода на посадку или другую маркировку, относящуюся к ВПП) следует непрерывно держать непрерывно держать в поле зрения при полете по кругу на MDA / H. Когда установлен надежный контакт с наземными ориентирами и экипаж решил совершить визуальный заход на посадку, он обязан сообщить об этом службе движения. При выполнении полета по кругу разрешается выполнять наиболее рациональные траектории полета в горизонтальном полете или со снижением с целью сокращения расстояния и экономии топлива. Если при установлении визуального контакта с землей доклад службе движения о визуальном контакте не производился, экипаж обязан выдерживать обязательные траектории.
Для выполнения визуального маневрирования (визуального полета по кругу) устанавливается зона визуального маневрирования, обозначаемая на диспетчерском радиолокаторе и ограниченная дугами, проведенными из центров порогов каждой ВПП. Радиус дуги зависит от посадочной категории ВС, рекомендуемой скорости ВС для захода на посадку для каждой категории, скорости ветра (учитывается скорость 46 км/ч или 25 узлов) и радиуса разворота (со средним креном 20 ° или угловой скоростью разворота 3 ° /сек) независимо от величины угла разворота). Пример расчета радиуса зоны визуального маневрирования представлен в таблице:
Схема захода на посадку по приборам зависит от окружающей А/Д местности, типа предполагаемых полетов и категории ВС. Эти факторы учитываются при выборе типа и места расположения РТС относительно ВПП или А/Д. Выбор места расположения РТС ВН также может зависеть от ограничений ИВП.
Схема захода на посадку по приборам может иметь пять отдельных участков. Это: участок подхода; начальный (IAF - IF), промежуточный (IF – FAF) и конечный (FAF – MAPt) участки захода на посадку; участок ухода на второй круг (MAPt – SOC). Участки захода на посадку начинаются и заканчиваются в установленных контрольных точках. При некоторых обстоятельствах определенные участки могут не обозначаться или начинаться и заканчиваться в установленных (не контрольных) точках, где отсутствуют контрольные точки. Например, при заходе с прямой точка IF может не обозначаться, а точка ухода на второй круг (MAPt) может быть не маркирована – определена абсолютной высотой, на номинальной глиссаде захода на посадку, принятия решения пилота о продолжении захода и посадки в зависимости от различных ситуаций.
По возможности, предусматривается заход на посадку с прямой, линия пути при котором совпадает с C/L. Неточный заход на посадку с прямой считается приемлемым, если угол между линией пути конечного этапа захода на посадку и C/L составляет £ 30 0 .
Если по характеру местности, градиенту снижения или по другим ограничениям, которые не отвечают условиям, установленным для захода с прямой, то схема захода на посадку будет выполняться по кругу с выходом на А/Д.
Для каждого А/Д в радиусе 46км (25 ММ) устанавливаются минимальные абсолютные высоты с превышением над максимальным превышением 300 м, если не указано иное.
Для определения ВП и видимости, необходимых для выполнения различных маневров при заходе на посадку по приборам, основное влияние оказывают ЛТХ ВС. Наиболее важным элементом характеристик является скорость. Поэтому для обеспечения стандарта выбора схем захода на посадку установлены пять категорий типичных ВС (см. т. 14. Организация визуальных заходов на посадку). На схеме захода на посадку по приборам указывается категория ВС, для которых утверждена данная схема, чтобы обеспечить защищаемой ВП и запас высоты над препятствиями для ВС до категории D включительно. В некоторых случаях для защити ВП или учета особенностей захода на посадку на схеме может указываться максимальная приборная скорость (IAS) для конкретного участка без ссылки на категорию ВС.
При разработке схем основным фактором безопасности является запас высоты над препятствиями, которые рассматриваются как минимально необходимые для обеспечения приемлемого уровня безопасности. [ 4 ].
Основные действия диспетчера по обслуживанию прибывающего ВС:
· координация действий с органами ОВД: АДВ (Tower) и РДЦ (ACC) и выдача разрешений на прибытие ВС (разрешение входа в зону ТМА, заход на посадку или ожидание ВС в ЗО);
· разрешение захода на посадку по выбранной пилотом системе, методу захода, использованию параллельных или почти параллельных ВПП (см.тему 13 «Эшелонирование в окрестностях А/Д);
· обеспечение неудачного захода на посадку;
· УВД на начальном (от IAF до IF) и промежуточном (от IF до FAF) сегментах захода на посадку;
· УВД с использованием обзорного радиолокатора ОРЛ-А (заход по локатору до ДПРМ);
· УВД с использованием посадочного радиолокатора ПРЛ (заход по локатору на предпосадочной прямой);
· направление ВС на запасный А/Д, по решению пилота;
· дополнительные процедуры: управление вертикальной и горизонтальной скоростями; обеспечение полета по ПВП в контролируемом ВП; обеспечение полета ВС на абсолютной высоте перехода и ниже; обеспечение полета ВС на эшелоне перехода и выше; пересечение ВС государственной границы; переход в (из) ВП с сетью частот с шагом 8,33 кГц; изменение А/Д назначения; маневрирование ВС по информации TCAS; действия при получении информации кратковременного предупреждения о: конфликтной ситуации (STCA), минимальной безопасной абсолютной высоте (MSAW), пересечении опасного ВП (APW);
· предоставление полетно-информационного/консультативного обслуживания;
· аварийное оповещение и содействие пилоту, эксплуатанту и организациям.
Диспетчер ДОП осуществляет УВД с применением технологических операций и процедур, изложенных в Рабочей инструкции, согласно выбранной пилотом системе или методу захода ВС на посадку. Применяются следующие методы и системы захода на посадку:
· визуальный- заход на посадку при полете по ППП, когда схема захода на посадку по приборам частично или полностью не соблюдается и заход выполняется по визуальным наземным ориентирам (визуальный заход на посадку организуется на аэродромах: не оборудованных РТС посадки, а также в случае отказа этих средств; с целью экономии топлива, летного времени и повышения пропускной способности аэродромов, независимо от оборудования аэродрома РТС).
· с целью обеспечения скорейшей посадки при возникновении особых случаев полета
· по РТС обратного старта– не точный заход на посадку с применением РТС, расположенных с обратной стороны посадочного курса;
· по приводам – не точный заход на посадку с применением оборудования системы посадки (ОСП), в состав которой входит ДПРМ и БПРМ;
· по минимуму категории II-точный заход на посадку и посадка по приборам ВПР менее 60м (200ft), но не менее 30м (100 ft) и при дальности видимости на ВПП не меньше 300м.
· по минимуму категории IIIA-точный заход на посадку и посадка по приборам:
а) с ВПР менее 30м (100 ft) или без ограничения по ВПР;
б) при дальности видимости на ВПП не менее 200м.
· по минимуму категории IIIВ-точный заход на посадку и посадка по приборам:
а) с ВПР менее 15м (50 ft) или без ограничения по ВПР;
б) при дальности видимости на ВПП менее 200м, но не менее 75м.
· по минимуму категории IIIС-точный заход на посадку и посадка по приборам без ограничения по ВПР; и дальности видимости на ВПП.
· по радиолокатору - заход на посадку, конечный этап которого выполняется под руководством диспетчера радиолокационного контроля.
На взлете (в момент отрыва) пассажирского самолета (например, Ту-134/154) развивается нештатная ситуация и командир принимает решение о посадке обратным курсом, т.к. времени на другие варианты может не хватить.
Как командир ( напомню, еще находясь над полосой ) будет строить маневр захода на поcадку ?
(Интересует как бы "вид сверху" на траекторию захода).
Не сомневаюсь, что это описано в документах по типам самолетов и/или аэродромам, но буду благодарен за ответ "на пальцах".
Выполняют заход стандартным разворотом:отворот влево или вправо на 60 гр.и потом на курс обратный посадочному.Всё это обговаривается на предполётной подготовке.
В штиль или при небольшом встречном ветре строится т.н. стандартный разворот. Самолет отворачивает под 80 градусов, допустим, вправо, с максимально допустимым креном, затем пилот перекладывает крен в обратную сторону и разворачивается влево, с максимальным креном, под 270 гр. на полосу. Возьмите карандаш и попробуйте нарисовать. Это заход по кратчайшему расстоянию.
Здесь есть нюансы. Если начать отворот прямо над полосой, то и закончится стандартный разворот примерно над торцом полосы. А ведь в процессе стандартного разворота надо успеть набрать безопасную высоту над препятствиями, выпустить шасси, если они убирались после отрыва, снизиться, вписаться в глиссаду, стабилизировать скорости - и лучше сделать это заранее, чтобы хоть последний кусочек полета был по прямой. А в это время ветер стремится отнести самолет (вместе с воздушной массой, в которой он летит)назад к полосе. Надо иметь мужество (допустим, при пожаре)после перекладки крена и выхода на обратный посадочному курс убрать крен, "протянуть" самолет в направлении от полосы, чтобы компенсировать относ, и лишь потом продлжить выполнение разворота. Либо не торопиться с выполнением стандартного разворота, а сначала уйти подальше от полосы. Тогда будет запас. Но посадка будет с попутным ветром, обязательно с перелетом, возможно, с выкатыванием за полосу. Такой заход очень сложен.
А если встречный ветер сильный, то стандартным разворотом вообще не зайдешь, не получится: самолет вынесет на высоте на полосу. Поэтому в сильный ветер маневр аварийного захода строится "малой коробочкой", т.е. спаренный первый-второй разворот, полет с курсом обратным посадочному, выпуск шасси, и в районе ближнего привода (1000 м от торца), снова спаренный третий-четвертый, со снижением.
Полет по малой коробочке предпочтительнее потому, что, занимая примерно столько же времени, как и стандартный разворот, он выполняется по привычному для пилота стереотипу, как всегда, только более сжат во времени и пространстве. При этом нет необходимости на земле переключать работу всех систем посадки на обратный курс, система готова, и вписаться в глиссаду легче, и посадка против ветра, и самолет остановится на полосе, и диспетчеру легче руководить работой спасательных служб.
Заход обратным курсом рассматривается в РЛЭ отечественных типов как основная техника спасения при развитии аварийной ситуации (пожар двигателя когда они в компактном пакете собраны и питают гидравлику - страшен - потому надо скорее обратно)
Но в современных нагруженных портах такое сложнореализуемо - с большой вероятностью полоса будет уже занята и сзади уже будет взлетающий борт, ну или как минимум выползший уже на полосу. Угонять его с полосы будет куда дольше чем если он просто взлетит
+ пожар менее страшен (как показывает практика) на 737 и 320 с двигателяами CFM расположеными на пилонах под крылом, посему концепция качества в ушерб скорости превалирует: рассматривается заход по укороченной коробочке с тем, чтобы выполнить все процедуры и не сесть, скажем, без шасси по причине непрочитанного чеклиста ввиду дефицита времени.
Строится же она просто - взлет по прямой - отворот влево(вправо) - разворот на курс обратный взлетному и сам заход
В догонку: как верно замечено выше (и оттестировано нами на тренажере - тоже спорили) - заход по коробочке зачастую БЫСТРЕЕ захода с обратным курсом (если специально не тренироваться) ввиду того что экипаж действует по привычной схеме.
2Ершов Василий Васильевич:
Спасибо большое, все понятно. Собственно, потому и спросил, что в Ваших книгах этот момент не увидел, может, просто прочитал невнимательно.
Раздел 3. РАСЧЕТ ЭЛЕМЕНТОВ МАРШРУТА ВИЗУАЛЬНОГО ЗАХОДА
НА ПОСАДКУ
Для каждого аэродрома рассчитываются и составляются схемы
визуального захода на посадку. В зависимости от типа эксплуатируемых
ВС, как и по ППП, схемы могут быть трех вариантов.
Расчет элементов маневрирования при визуальном заходе на
посадку производится с учетом выполнения разворотов в штурвальном
режиме.
Ширина маневра установлена для схем первого варианта 4 км,
второго варианта - 3 км, третьего варианта - 1, 5 км.
Маршрут маневра начинается от характерного наземного ориентира.
Полет по маршруту производится на безопасных высотах при
постоянной видимости ВПП с выходом на предпосадочную прямую на
заданном расстоянии от начала ВПП.
Подход к аэродрому и выход на визуальный полет производится с
использованием РТС, расположенных в районе аэродрома. Эти средства
могут использоваться и для контроля за выдерживанием маршрута
маневра. Выпуск шасси, а за ним и закрылков начинается до точки
начала маневра (ТНМ) по схемам первого варианта за 5-6 км, второго
варианта - за 3-4 км, а довыпуск закрылков - до начала разворота на
предпосадочную прямую по схемам первого варианта за 2 км; второго
варианта - за 1 км.
Безопасная истинная высота полета и ширина полосы учета
превышений рельефа местности и препятствий по маршруту подхода и
маневрирования до начала разворота на предпосадочную прямую
установлены для схем первого варианта соответственно равными 200 м и
5 км в обе стороны от оси маршрута, а для схем второго и третьего
вариантов установлены ограничения по приборной высоте полета, равной
100 и 50 м соответственно, при условии обхода препятствий визуально
на удалении не менее 500 м.
Высоты полета по прибору в начале снижения на предпосадочной
прямой () для схем первого, второго и третьего вариантов установлены
соответственно равными 100, 80 и 60 м.
При выходе ВС к ВПП с направления, обратного направлений
посадки, маневр захода целесообразно начинать углом отворота на 45°.
Возможные варианты маршрутов визуального захода на посадку для
одного направления и одного круга полетов показаны на рис. 44.
Коллеги, пытаюсь понять ситуацию - ошибка это или так положено.
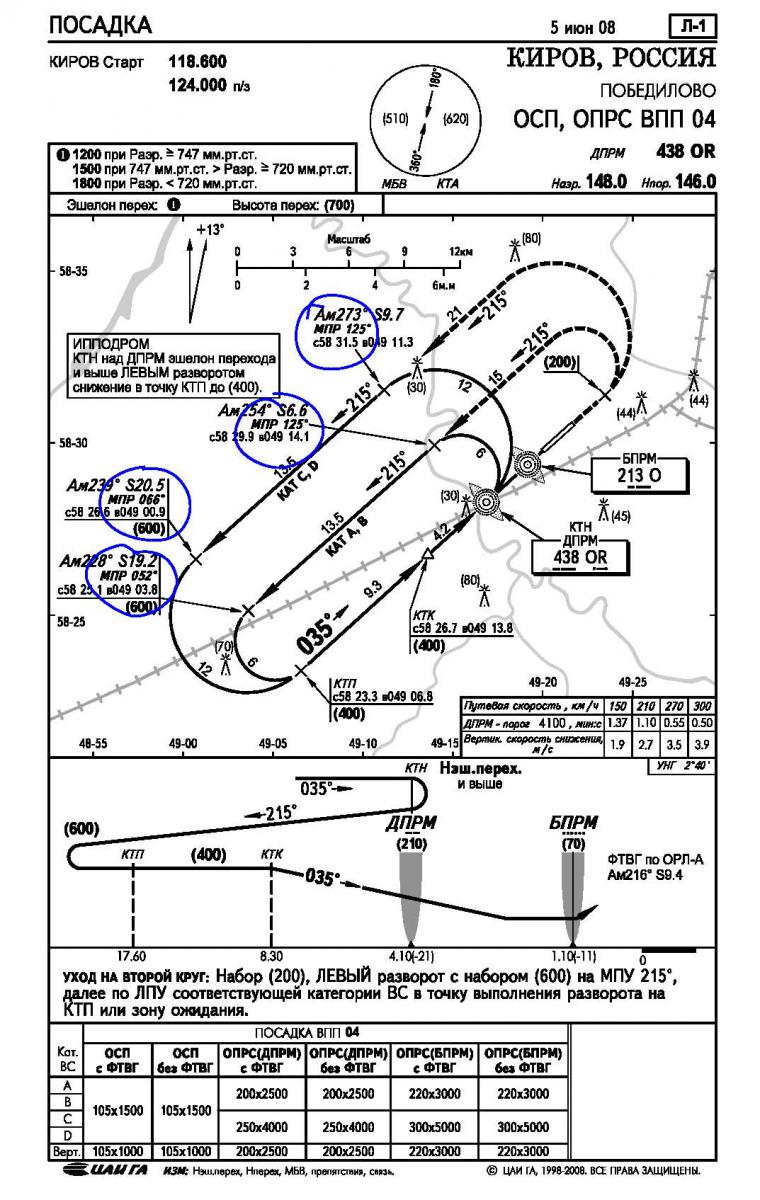
На схеме захода по ОПРС обратного старта (например, схема Л-2 для USKK) показаны значения МПР из нескольких точек схемы. На какое радиосредство указывают эти пеленги? Единственное нарисованное на схеме радиосредство - это БПРМ обратного старта, но на предыдущей схеме (Л-1, заход по ОСП на ту же полосу) для тех же точек даны те же МПР (которые, насколько я понимаю, в такой ситуации должны указывать на ДПРМ). Где грабли? Это ошибка на схеме или это пеленг на что-то другое?
Экзот
Элефантерия
Ultranomad
G-NODE
Пожалуйста. Найдите 10 отличий

Ultranomad
G-NODE
blck, как я понимаю, Ам и S указаны по диспетчерскому радиолокатору. А МПР, получается, вообще филькина грамота?
Усталый мудрый кот
Гыыыы я такое видел уже на РСБН, который. давно снят. Там ведь дистанции указаны - следовательно должно быть радиосредство с дальномером, которое стояло, судя по всему, где-то левее ВПП
Ultranomad
G-NODE
blck, если сравнить указанные значение Ам и МПР (они различаются не на 180 градусов), получается, что МПР идет на радиосредство, находящееся существенно юго-западнее торца - т.е., по сути дела, как обычно и полагается, на ДПРМ 04. Меня удивляет то, что на схеме Л-2 про ДПРМ 04 ни сном ни духом! Только БПРМ 22.

Заход на посадку методом Circle-to-Land (или Circling approach) применяется в том случае если заход по приборам выполняется на одну ВПП, а посадку по тем или иным причинам требуется выполнить на другую ВПП. Таких случаев может быть несколько, например, предположим, что процедура захода на посадку по приборам опубликована только для одного курса, при этом попутный ветер не позволяет выполнить посадку с этим курсом, а видимость не позволяет выполнить визуальный заход с обратным стартом. Аналогично, например аэродром имеет две пересекающихся ВПП, а процедуры захода на посадку по приборам есть только для одной. При метеоусловиях ниже минимума для визуального захода на посадку и закрытии основной ВПП, заход выполняется на закрытую ВПП до минимальной высоты снижения, далее осуществляется визуальное маневрирование и посадка на другую ВПП.

Схема захода на посадку в аэропорту Самос (Греция).
Линия пути конечного этапа захода на посадку подходит к ВПП под прямым углом.
Выполнение посадки возможно только методом Circle-to-Land.
Зона визуального маневрирования и минимальная высота снижения.
В зависимости от наличия и высоты препятствий вокруг аэродрома для захода Circle-to-Land устанавливается минимальная высота снижения, которая обеспечивает безопасный пролет всех препятствий в зоне визуального маневрирования. Границы зоны визуального маневрирования при заходе на посадку по кругу определяется путем проведения дуг с центрами в местоположении каждого порога ВПП и касательных, соединяющих эти дуги. Радиусы дуг выбираются исходя из категории воздушного судна (напомним, категория определяется по скорости).

Методика построения зоны визуального маневрирования.
Необходимо помнить, что в зависимости от применяемых критериев построения схем, радиусы могут варьироваться. Так, их значения установленные в TERPS (документ регламентирующий построение схем в США) значительно меньше значений установленных в документе 8168 PANS-OPS ИКАО. При международных полетах следует обращать внимание по каким критериям построена схема.
| A | B | C | D | E | |
|---|---|---|---|---|---|
| PANS-OPS | 1,68NM | 2,66NM | 4,2NM | 5,28NM | 6,94NM |
| TERPS | 1,3NM | 1,5NM | 1,7NM | 2,3NM | 4,5NM |
Выполнение визуального маневра.
Заход на посадку по кругу представляет собой визуальный маневр в полете. Условия в каждом полете по кругу различны, поскольку они зависят от таких переменных факторов, как расположение ВПП, линия пути конечного этапа захода на посадку, скорость ветра и метеорологические условия. Поэтому невозможно разработать единую схему, которой бы учитывались любые условия, в которых выполняется заход на посадку по кругу.

Варианты выполнения визуального маневрирования.
Если не установлены особые условия, маневрирование выполняется на усмотрение экипажа.
После первоначального визуального контакта, находясь на минимальной высоте снижения при полете по кругу, следует непрерывно держать в поле зрения окружение ВПП. Окружение ВПП включает такие характерные ориентиры как порог ВПП или светосигнальные средства захода на посадку, или иную маркировку опознавания ВПП.

Возможный вариант маневра при заходе Circle-to-Land
Снижение ниже MDA/MDH (minimum descend altitude/height) не производится до тех пор, пока:
- не будет установлен и поддерживаться визуальный контакт с ориентирами
- пилот не увидит порога ВПП
- не будет выдерживаться необходимый запас высоты над препятствиями
- воздушное судно не займет соответствующего положения для выполнения посадки.
Уход на второй круг.
Если при полете по кругу с целью посадки после захода на посадку по приборам теряется визуальный контакт с ориентирами, необходимо придерживаться ухода на второй круг,указанного для данной конкретной схемы захода на посадку. Переход от визуального маневра (полета по кругу) к уходу на второй круг должен начинаться с разворота с набором высоты в пределах зоны полета по кругу в направлении посадочной ВПП, далее осуществляются вход в схему ухода на второй круг и ее выполнение. Приборная воздушная скорость при выполнении этих маневров не должна превышать максимальную приборную воздушную скорость при визуальном маневрировании.
Circle-to-land with prescribed tracks (с предписанной линией пути).
На аэродромах, где позволяют четко определенные визуальные ориентиры (и если это желательно с эксплуатационной точки зрения), государство, в дополнение к зоне полета по кругу, может установить специальную линию пути визуального маневрирования. Следует отметить, что в случае такой схемы полет основан на визуальном ориентировании, а любая представляемая радионавигационная информация носит только консультативный характер.

Схема захода на посадку в аэропорту Сплит (Хорватия).
После пролета VOR SPLIT визуальное маневрирование выполняется по предписанной линии пути
Из зоны визуального маневрирования может быть исключена какая то ее часть, как правило это делается из-за наличия высоких препятствий или из соображений организации воздушного движения. В этом случае на схеме в обязательном порядке обозначается сектор, в котором визуальное маневрирование запрещено.

В чем разница между Circle-to-Land и визуальным заходом на посадку?
В заключении, отметим, что заход на посадку Circle-to-Land очень часто путают с визуальным заходом на посадку. Связано это с тем, что в российских документах под визуальным заходом на посадку понимается как раз заход Circle-to-Land. Как следствие, возникает путаница. Визуальный заход — это принципиально отличающийся от захода Circle-to-Land вид захода на посадку. Для визуального захода отсутствует как таковая зона визуального маневрирования. Визуальный полет выполняется на усмотрение экипажа и, как правило, сразу на ВПП посадки, ответственность за безопасный пролет препятствий целиком лежит на экипаже. Минимум для визуального захода на посадку устанавливается, как правило, стандартный для государства (зависит от правил конкретной страны).
Читайте также: