
Зачем вертолет делает круг перед посадкой
Обновлено: 19.09.2024
Все посадки необходимо по возможности выполнять против ветра.
Перед посадкой необходимо проверить готовность экипажа к ней по контрольной карте (приложение 7).
Вертикальная посадка с работающими двигателями
Вертикальная посадка с работающими двигателями является основным видом посадки для вертолета.
Посадку выполнять против ветра (при необходимости или по тактическим соображениям допускается посадка при боковом ветре до 7 м/с и попутном ветре до 5 м/с). Планирование перед посадкой производить на скорости по прибору 110 км/ч.
С высоты 100 м плавно отклонить ручку управления на себя и произвести уменьшение поступательной скорости с таким расчетом, чтобы на высоте скорость по прибору составляла
С высоты плавным перемещением ручки управления на себя и одновременным увеличением общего шага несущего винта погасить поступательную и вертикальную скорости вертолета с таким расчетом, чтобы произвести зависание на высоте
Плавно уменьшить общий шаг несущего винта, так чтобы вертикальная скорость снижения до момента касания колесами земли не превышала 0,2 м/с. Не допускать боковых перемещений вертолета перед приземлением. Уменьшить общий шаг несущего винта до минимального, предварительно убедившись, что вертолет устойчиво стоит на грунте.
Примечание. При посадке с боковым ветром удерживать вертолет от смещений отклонением ручки управления в сторону ветра до момента приземления.
После заруливания на стоянку поставить вертолет на стояночный тормоз и выключить потребители электроэнергии, за исключением приборов, контролирующих работу силовой установки. Установить рукоятку коррекции в крайнее левое положение и на режиме малого газа в течение мин охладить двигатели. Установить ручку управления в положение на себя на одно деление по указателю триммера и стоп-краном выключить оба двигателя. После остановки двигателей закрыть пожарные краны и выключить подкачивающие насосы.
Посадка вертолета с работающими двигателями с поступательной скоростью (по самолетному)
Посадка с работающими двигателями с поступательной скоростью выполняется в случае невозможности произвести зависание из-за недостатка располагаемой мощности двигателей и в учебных целях.
Посадка может производиться на аэродром или ровную проверенную площадку при условии безопасности подхода. Для выполнения посадки по самолетному планирование после четвертого разворота производить со скоростью 110 км/ч по прибору.
С высоты уменьшать скорость планирования взятием ручки управления на себя так, чтобы на высоте приборная скорость уменьшилась до Снижение с высоты выполнять с постепенным уменьшением поступательной скорости полета и вертикальной скорости снижения с таким расчетом, чтобы при выходе на высоту скорость полета была а вертикальная скорость снижения
Плавно приземлить вертолет на основные колеса с последующим опусканием переднего колеса и уменьшением общего шага несущего винта до минимального.
Торможение вертолета для уменьшения длины пробега производить несущим винтом, отклоняя ручку управления на себя, и тормозами колес.
Посадка на режиме самовращения несущего винта
Посадка на режиме самовращения несущего винта при неработающих двигателях производится при одновременном отказе двух двигателей в полете, поломке трансмиссии, при которой не нарушается вращение несущего винта, и в учебных целях.
Посадка на режиме самовращения несущего винта может выполняться двумя способами: с поступательной, скоростью приземления и с малой скоростью приземления
Посадка с поступательной скоростью приземления по технике пилотирования проще и может применяться в учебных целях.
Для посадки с выключенными двигателями в учебных целях необходимо:
- на высоте произвести расчет на посадку;
- перевести вертолет на снижение на скорости 100 км/ч по прибору;
- уменьшить общий шаг несущего винта до минимального и повернуть рукоятку коррекции влево до упора;
- убедиться, что вертолет устойчиво снижается с вертикальной скоростью и обороты несущего винта установилась в пределах 79 +1 —84%:
- выключить на высоте не менее оба двигателя закрытием стоп-кранов, предварительно убедившись в точности расчета.
На установившемся планировании триммерами сбалансировать вертолет и выдерживать:
- скорость планирования 100 км/ч по прибору;
- обороты несущего винта 79 +1 -84%
Заход на посадку производить против ветра или при ветре не более 5 м/с. C высоты ручкой управления произвести плавное торможение вертолета до скорости и на этой скорости произвести снижение до высоты
Вертолет приземляется на основные колеса на скорости После приземления уменьшить общий шаг несущего винта до минимального; для сокращения длины пробега использовать тормоза колес.
Посадка на режиме самовращения несущего винта с отказавшими двигателями с малой поступательной скоростью приземления по технике пилотирования сложна и может производиться только на неподготовленные или малоразмерные площадки.
Посадка с одним работающим двигателем
Посадка с одним работающим двигателем может производиться в случае отказа одного из двигателей и с учебной целью.
Посадку с учебной целью рекомендуется выполнять при массе вертолета не более 3300 кг.
Для выполнения учебной посадки с одним работающим двигателем необходимо:
В процессе отработки посадок с одним работающим двигателем вертикальную скорость снижения на высоте постепенно увеличивать до
Высота начала гашения вертикальной скорости перед приземлением во всех случаях должна соответствовать 1,5 Vy.
Примечание. Посадка вертолета с одним работающим двигателем с вертикальной скоростью снижения происходит практически без пробега.
ПРЕДУПРЕЖДЕНИЕ. При выполнении посадки с одним работающим двигателем увеличивать вертикальную скорость снижения более 4 м/с запрещается.
Перед выполнением захода на посадку экипаж должен иметь ясное представление о размерах и конфигурации посадочной площадки, рельефа местности, направлении и скорости ветра, температуре воздуха, барометрической высоте площадки и видимости. Прямоугольный маршрут должен строиться так, чтобы обеспечивалось непрерывное наблюдение за площадкой, строгое выдерживание заданных режимов полета и параметров полета. Развороты выполняются с креном не более 15°.
Если при заходе на посадку допущена ошибка и возникло какое-либо сомнение или неуверенность в её благополучном исходе, то командир вертолета должен уйти на второй круг и выполнить повторный заход.
После выполнения четвертого разворота и выхода на предпосадочную прямую экипаж должен обеспечить:
- правильный выбор траектории снижения;
- плавное уменьшение поступательной скорости;
- зависание вертолета на установленной высоте перед приземлением.
От правильного выбора траектории снижения зависят точность расчета, выдерживание заданных скоростей снижения, зависание и посадка вертолета. Правильно выбранная траектория позволяет экипажу непрерывно просматривать посадочную площадку и место посадки вертолета, выдерживать вертикальную скорость снижения не более 2-3 м/с, обеспечивает пролет препятствий на границе посадочной площадки на высоте не ниже 10 м.
После выполнения четвертого разворота и перехода на снижение поступательная и вертикальная скорости должны постепенно уменьшаться с таким расчетом, чтобы вертолет снижался строго по выбранной траектории и обеспечивался непрерывный просмотр посадочной площадки и места посадки.
Темп уменьшения поступательной скорости контролируется по проекции посадочной площадки на остеклении кабины экипажа. Незначительное смещение проекции вниз свидетельствует о плавном уменьшении скорости, смещение, проекции вниз к обрезу приборной доски вызывается энергичным уменьшением скорости. Если приборная доска закрывает площадку, то скорость уменьшается резко. Рекомендуемое положение проекции площадки на остекление кабины экипажа 10-15 см выше нижнего обреза лобового стекла.
Снижение с высоты 100 м производится на поступательной скорости 60-70 км/ч (при скорости встречного ветра не более 4 м/с). С увеличением скорости встречного ветра на каждый 1 м/с, поступательная скорость должна быть увеличена на 3 км/ч. Так при скорости ветра 15-20 м/с скорость по прибору должна быть в пределах 100-130 км/ч.
Одновременно с уменьшением поступательной скорости по траектории производится корректировка вертикальной скорости снижения. Рекомендуемая вертикальная скорость 2-3 м/с.
Перед принятием решения на выполнение посадки экипаж обязан определить место приземления вертолета и осмотреть:
- местность и площадь, лежащую впереди и слева;
- местность и площадь первой полусферы (осматривает второй пилот);
- зону рулевого винта (при необходимости), для этого следует развернуться на 45° влево, если позволяют условия;
- площадь под вертолетом (осмотр производить при кратковременном перемещении вертолета вправо до 5 м, с последующим возвращением на место приземления).
Осмотр места посадки на режиме висения выполняется, если экипаж уверен, что в зоне посадки нет препятствий. Решение на посадку экипаж принимает только после того, как убедится в полной ее безопасности.
Посадка производится с высоты 3-5 м с вертикальной скоростью снижения 0,2 м/с. При приземлении нельзя допускать боковых перемещений вертолета, особенно в момент касания земли. Уменьшать общий шаг НВ можно лишь при полной уверенности, что вертолет стоит колесами на твердом и ровном грунте.
Если после приземления возникает необходимость дополнительно убедиться в пригодности места для посадки, то бортмеханик-инструктор по команде пилота-инструктора выходит из вертолета и, находясь в поле зрения экипажа, проверяет, нет ли препятствий в зоне приземления и их удаление, состояние грунта под колесами вертолета. Если место приземления не соответствует требованиям безопасности, бортмеханик-инструктор должен оказать экипажу в перемещении вертолета на пригодное для посадки место.
При уменьшении частоты вращения НВ после приземления возможно возникновение кренов вертолета из-за неравномерной твердости грунта. Сброс шага производится с максимальной осторожностью по командам бортмеханика-инструктора. Допустимым считается крен, при котором шарик указателя поворота смещается от центра на один диаметр (примерно 3° крена). На посадочной площадке с уклонами посадку следует производить вверх по уклону, не допуская, чтобы угол тангажа был более 5°.
Характерные отклонения и ошибки при посадке на посадочную площадку, их причины
1. Чрезмерное опускание хвостовой балки на зависании.
- позднее начало гашения скорости;
- подход к месту зависания на большой скорости.
2. Снижение вертолета в момент зависания.
Причина: несвоевременное или недостаточное увеличение мощности двигателей в момент зависания.
3. Вертикальное снижение с перемещениями.
- не учитывается снос вертолета;
- резкие и нескоординированные движения органами управления.
Взлет с посадочной площадки
Перед взлетом с посадочной площадки необходимо выполнить
- контроль по карте, раздел "Перед взлетом";
- доложить диспетчеру УВД;
- проинформировать экипаж о предстоящем маневре.
Отрыв производить против ветра строго вертикально, не кренов и смещений вертолета. После контрольного висения на высоте 10 м произвести разгон вертолета при одновременным наборе высоты с использованием мощности двигателей вплоть до взлетной, частоты вращения не менее 92%.
Дальнейший набор высоты на скорости 60-70 км/ч без уменьшения режима работы. После преодоления препятствий (но на высоте не менее 20 м над ними) необходимо перейти на наивыгоднейший режим набора высоты со скоростью 120 км/ч.
При взлете необходимо:
- плавно действовать рычагом "ШАГ-ГАЗ" при отрыве и наборе высоты;
- набирать высоту без перемещения, строго по вертикали
- выдерживать установленную высоту висения над препятствиями
- соблюдать координацию и плавность действия органами управления при переходе на поступательную скорость.
Характерные отклонения и ошибки на взлете, их причины
1. Вертикальный набор высоты производится с перемещениями.
- резкая, не координированная работа органами управления;
- не учитывается снос вертолета;
2. Снижение вертолета при переходе на поступательную скорость.
- резкий перевод на поступательную скорость (большие по размаху и резкие движения ручкой управления);
- недостаточное увеличение мощности двигателей.
ПОЛЕТЫ НОЧЬЮ
Особенности полетов ночью
Ночные полеты на вертолете Ми-8 разрешаются при наличии и исправности следующего ночного оборудования:
- исправного штатного светотехнического оборудования вертолета;
- ракетницы с комплектом цветных ракет;
- переносных электрических фонарей (в необходимом количестве).
В ночных полетах дублирующими средствами связи являются световые сигналы (ракеты, прожектор, стартовые огни).
Пилотирование вертолета Ми-8 в ночных условиях требует от пилота большого внимания и твердых навыков в выполнении полетов по приборам. Особенно усложняется заход на посадку и посадка в темную облачную ночь, когда весь полет выполняется практически только по приборам. При осадках, дымке или тумане затрудняется использование посадочных фар из-за образующегося светового экрана. В светлую ночь пилотирование осуществляется по естественному горизонту и наземным ориентирам при контроле положения вертолета по показаниям пилотажных приборов.
Яркость освещения приборов, щитков и пультов регулируется реостатами и должна обеспечивать хорошую видимость в кабине и за бортом вертолета. Переключатель яркости светосигнализации (табло) на правом щитке нужно поставить в положение "НОЧЬ" и проверить включен ли выключатель "МИГАЛКА". При проверке посадочно-рулежных фар следует убедиться в исправности механизма выпуска и уборки.
Направление световых потоков от источников освещения в кабине должно быть таким, чтобы на стеклах фонаря не образовывались отблески, затрудняющие наблюдение за воздушным пространством за бортом.
Спуск, или планирование, выполняется на таком режиме работы несущего винта, когда воздух проходит сквозь ометаемую винтом поверхность снизу вверх. При этом угол атаки винта А может изменяться в больших пределах, от незначительных углов до +90°. При А= +9СР воздух проходит через ометаемую винтом поверхность снизу-вверх в осевом направлении, и вертолет опускается отвесно.
В остальных случаях происходит косая обдувка винта, и вертолет опускается по наклонной траектории. Рассмотрим спуск по наклонной траектории.
Кроме того, должны быть уравновешены моменты, действующие вокруг трех осей.
Вертолет может планировать под любым углом к горизонту. В случае крутого планирования несущий винт устанавливается под положительным углом к набегающему потоку воздуха, поток косо проходит через ометаемую винтом поверхность снизу-вверх). В тех случаях, когда выполняется пологое планирование, несущий винт устанавливается под отрицательным углом к потоку, поток косо проходит через ометаемую винтом поверхность сверху вниз) так, как это имело место при горизонтальном полете или при наборе высоты по наклонной траектории. При этом величина подъемной силы определяется установкой общего шага несущего винта и оборотами двигателя.
При большом шаге (большой газ) вертолет будет набирать высоту. При уменьшенных значениях шага и газа вертолет будет лететь горизонтально. При малом шаге (малом газе) — планировать.
Отвесный спуск производится на А = + 90°, поток будет обдувать несущий винт в осевом направлении, снизу-вверх. Винт, отбрасывая массу воздуха вниз, будет создавать подъемную силу, уравновешивающую вес вертолета и обеспечивающую спуск с любой скоростью, вплоть до зависания на любой высоте ниже статического потолка.
С увеличением скорости спуска несущий винт поглощает все меньше и меньше мощности двигателя, так как набегающие на винт снизу струи воздуха раскручивают его, как ветряную мельницу.
При достаточно больших скоростях снижения наступает режим самовращения (авторотация) несущего винта, когда работа двигателя может оказаться вообще излишней, так как всю работу вращения несущего винта выполняет набегающий снизу поток.
При приближении к земле на расстояние, равное диаметру несущего винта и менее, тяга его значительно увеличивается, а за счет этого уменьшается скорость снижения.
При отказе двигателя посадку можно совершить на режиме самовращения несущего винта (авторотации). Как мы уже знаем, в обычном полете подъемную силу для вертолета создает несущий винт (ротор), приводимый во вращение двигателем.
Производить посадку на режиме самовращения — это значит планировать за счет подъемной силы, создаваемой винтом, который вращается под действием набегающего и проходящего через ометаемую им поверхность потока воздуха.
В школе делают такой опыт. Берут два сосуда: из одного воздух выкачивается, а из другого нет. Если поместить в верхней части каждого сосуда по кусочку ваты и одновременно опустить их, то в сосуде, где выкачан воздух, вата достигает дна сосуда раньше, чем в сосуде с воздухом.
Это происходит потому, что воздух оказывает падающему телу сопротивление. При этом сила сопротивления воздуха направлена вверх, против силы веса.
Сила же сопротивления, направленная против силы веса, и есть подъемная сила.
У падающего в воздухе тела подъемная сила (сила сопротивления) с ростом скорости падения все время возрастает, пока не станет равной силе веса, после чего падение продолжается уже с постоянной скоростью. Так, например, падает парашютист при затяжном прыжке.
Сила веса приложена в центре тяжести тела. Сила сопротивления — в центре давления тела.
Если центр тяжести случайно будет совпадать с центром давления или будет находиться строго под центром давления, то тело будет падать спокойно. Если же центр тяжести окажется в стороне от центра давления, то под действием момента силы падающее тело начнет вращаться вокруг центра тяжести. Когда тело повернется, то изменит свое положение центр давления, при этом вращение может начаться в другую сторону и продолжаться до тех пор, пока центр тяжести не окажется строго под центром давления. Так, покачиваясь, падает осенью в безветренный день опавший с дерева лист.

А вот семена клена падают иначе. Они не покачиваются, а вращаются вокруг вертикальной оси.
Они вращаются при этом под действием набегающего потока воздуха, создавая подъемную силу. А если подъемная сила направлена не строго вертикально, а несколько наклонно, то составляющая подъемной силы уже в качестве тяги сообщит телу поступательную скорость.
Для создания подъемной силы и тяги необходимо, чтобы несущий винт вращался.
Как правило, вращение создается двигателем, а если двигателя нет (отказал, выключен), надо воздействовать на винт потоком воздуха.
Для того чтобы на несущий винт набегал поток воздуха, надо, чтобы винт перемещался относительно воздуха — опускался или двигался поступательно или совершал эти перемещения одновременно.
Эти условия всегда налицо у вертолета, у которого отказал двигатель.
Если вертолет летит горизонтально со скоростью, например, 150 км/час и двигатель отказал, то, конечно, скорость вертолета сразу не упадет. По инерции также еще некоторое время будет вращаться и несущий винт.
Вертолет начнет постепенно снижаться, при этом постепенно будет гаснуть его поступательная скорость и расти вертикальная скорость. Если сначала винт вращался от двигателя, а затем, когда двигатель выключен, — по инерции, то теперь он будет продолжать вращаться под действием набегающего на него потока воздуха за счет поступательной скорость и снижения вертолета.
Однако для этого необходимо, чтобы угол установки лопастей (угол атаки, шаг винта) был вполне определенным, о чем будет сказано дальше.
Для выяснения условии самовращения несущего винта разберем работу элемента лопасти.
Силы, возникающие на элементе лопасти, зависят от величины и направления (угла атаки) суммарной скорости W, с которой профиль встречается с воздухом. Когда угол атаки винта отрицательный, скорость W подходит к профилю так, как это показано.
Под воздействием потока воздуха на элементе лопасти возникает аэродинамическая сила. Разложим эту силу на два направления: по потоку и перпендикулярно к нему.
Сила направленная перпендикулярно потоку, и сила, направленная по потоку, определяют собой как подъемную силу, создаваемую элементом лопасти, так и сопротивление вращению. Сопротивление вращению лопасти определяется суммой проекций сил. причем обе проекции направлены назад, против вращения. В этом случае, естественно, ни о каком самовращение несущего винта не может быть и речи. Наоборот, чтобы вращать винт, надо преодолеть момент сопротивления вращению, сообщая винту вращение от двигателя.
В случае, который характерен для положительного угла атаки несущего винта и малых установочных углов лопастей, получается иное направление сил. Теперь, если проекция силы на плоскость вращения направлена назад и препятствует вращению лопасти, то проекция силы на плоскость вращения направлена вперед и способствует вращению.

В том случае, когда обе проекции равны, наступает режим устойчивого самовращения несущего винта, т. е. вращения с постоянной скоростью без затраты мощности от двигателя, так как нет сил, препятствующих вращению, стремящихся остановить винт. Вращение, раз начавшись, продолжается с постоянным числом оборотов. Несущий винт, обдуваемый потоком воздуха снизу-вверх, работает, как ветряная мельница.
Следовательно, режим самовращения наступает при положительном угле атаки всего винта, когда лопасти установлены на малый установочный угол (малый шаг).
При этом винт будет создавать подъемную силу, равную сумме проекций сил на ось вращения (т. е. равную силе. На режиме самовращения вертолет, конечно, не может набирать высоту. Не может он также продолжать горизонтальный полет. На режиме самовращения вертолет может только снижаться. Имению снижение является источником скорости воздушного потока, обеспечивающего самовращение винта.
Переход на режим самовращения при отсутствии автомата сброса шага винта усложняется, так как появляется много факторов, отвлекающих внимание летчика: падает число оборотов, изменяется поле скоростей от винта, изменяются моменты на фюзеляже (появляется тенденция к пикированию), изменяются усилия на ручке управления.
Переход на режим самовращения возможен при различных скоростях полета вертолета. Эти скорости обычно не превышают 100 км/час. Возможен переход на самовращение также и при висении. Однако в последнем случае переход от висения к самовращению требует относительно большого времени, в течение которого вертолет теряет высоту. Поэтому режим висения рекомендуется осуществлять на высотах не менее 150—200 м. В противном случае можно
не успеть перевести винт на режим самовращения в случае отказа двигателя.
Висеть можно также на высоте менее 10 м. Если при этом откажет двигатель, то до момента встречи с землей вертолет не успеет набрать большой вертикальной скорости снижения.
Скорость снижения на режиме самовращения при вертикальном спуске может достигать 10 и более метров в секунду в зависимости от величины удельной нагрузки на каждый квадратный метр ометаемой поверхности несущего винта. Вертикальная скорость снижения пропорциональна корню квадратному из удельной нагрузки, т. е. большие нагрузки приводят к быстрому снижению.
Снижение на режиме самовращения при наличии поступательной скорости значительно безопаснее. Так, при спуске по наклонной траектории с наивыгоднейшей скоростью вертикальная скорость снижения составляет 0—8 м/сек, что не превышает скорости снижения парашютиста.

Упрощенную, но достаточно наглядную иллюстрацию к этому, я думаю, видел каждый еще в детстве. Я так достаточно хорошо помню, как мы с мальчишками носились по двору с самодельными пропеллерами из бумаги, укрепленными на палочках, и те довольно бойко вращались, раскручиваемые встречным ветром. Ветряные мельницы тоже сродни этим маленьким пропеллерам, и даже серфингисты, оседлавшие крутые океанские волны, имеют определенное отношение к явлению авторотации :-).
Авторотация возможна для любого винта, и самолетного, и вертолетного. Но только для одного летательного аппарата этот режим полета является штатным. Название у этого аппарата несколько необычно для русского уха – автожир :-). О нем я вам расскажу в одной из следующих статей. А сейчас вернемся к нашим…(нет, не баранам :-)) традиционным летательным аппаратам.
Самолет . Для него авторотация является режимом аварийным , то есть явно малоприятным. Возникать она может в случае остановки двигателя в полете (обычно без желания летчика), когда винт перестает приводится от двигателя и начинает раскручиваться набегающим потоком воздуха. Но при этом, особенно на достаточно большой скорости, возникает серьезное сопротивление потоку, которое ощутимо тормозит самолет, а если двигателей несколько, и они расположены на консолях крыла, то возникает еще и достаточно сильный разворачивающий и кренящий момент.
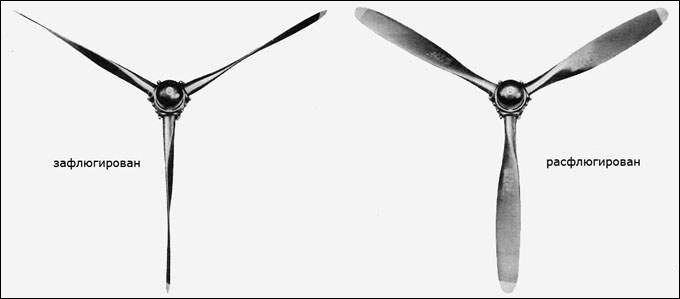
Пример флюгирования винта.
Все это чревато нехорошими последствиями. Поэтому на всех двигателях с винтами изменяемого шага предусмотрена возможность флюгирования , то есть установки лопастей по потоку (по возможности параллельно :-)), чтобы сократить до минимума вредное сопротивление. А потом, если потребуется движок запустить в воздухе ( для этого нужна предварительная раскрутка ротора) лопасти могут быть установлены в нужное положение для использования эффекта авторотации.

Турбовинтовой двигатель с зафлюгированными лопастями винта.
Вертолет. Здесь ситуация несколько иная. Дело в том, что хотя режим авторотации и является аварийным, но с его помощью вертолет может произвести мягкую посадку с неработающим двигателем. Правда при соблюдении некоторых условий. При работе двигателя в штатном режиме плоскость вращения винта обычно наклонена вперед и воздушный поток поступает на винт сверху. При отказе двигателя (или его выключении) вертолет начинает снижаться, и поток попадает на винт уже снизу. Появляется авторотация, но принципы обтекания лопастей воздушным потоком от этого не меняются.
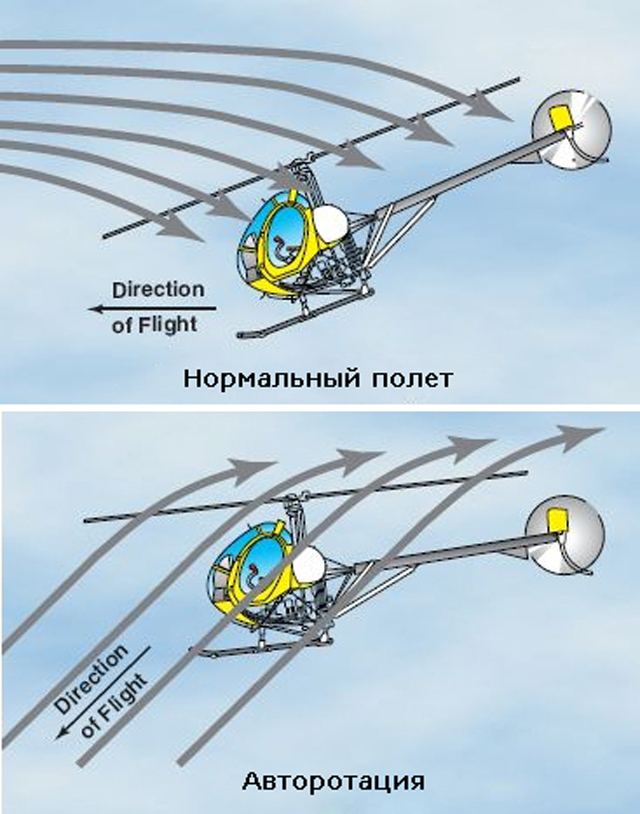
Направление воздушного потока на разных режимах полета.
В начале процесса снижения шаг винта должен быть уменьшен до минимума для обеспечения раскрутки винта. При большом шаге винт замедляет вращение и может даже начать вращаться в обратную сторону, что абсолютно нежелательно :-). Далее летчик контролирует скорость набегающего потока и, соответственно, вертикальную скорость снижения путем изменения шага винта.
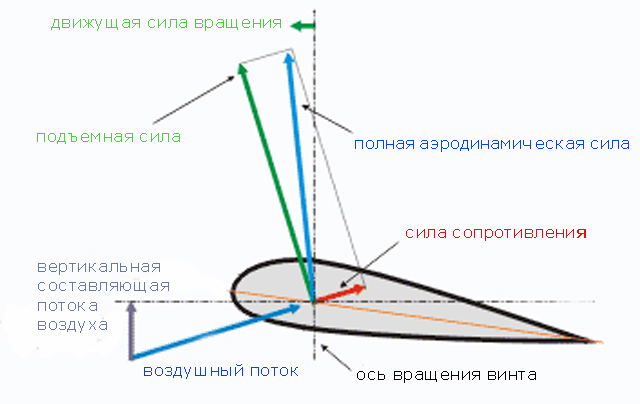
Силы действующие на профиль лопасти винта вертолета при авторотации.
То есть авторотация делает возможность благополучной посадки вертолета вполне реальной. Но вертолеты тем не менее падают… В чем же дело? Выше я уже упомянул об определенных условиях, необходимых для мягкой посадки. Их всего-то два, но без них удачи не видать :-).
Первое условие объективное и от экипажа вертолета не зависит, к сожалению. Для того, чтобы успеть использовать эффект авторотации для осуществления мягкой посадки нужно, чтобы вертолет в момент перехода на аварийный режим имел достаточный запас высоты, либо обладал достаточной горизонтальной скоростью. Либо то, либо другое (а лучше, когда и то, и другое вместе :-)) нужно для того, чтобы винт успел раскрутиться и аэродинамические силы достигли величин, достаточных для спасения. Иначе полет скорей всего закончится трагично. Последнее предложение больше относится к военным вертолетам, потому что они очень часто выполняют свои задачи на малых высотах.
Ну, а второе – это обучение пилотов и конструктивные возможности вертолетов. Каждый вертолет при своем создании проверяется на возможность использования режима авторотации, и каждый летчик обучается управлять вертолетом на этом режиме. Управление это не совсем простое и необходимы навыки для осуществления безопасной посадки.

Вертолет Aerospatiale SA.315B Lama.
В целом авторотация, конечно, полезное явление и, как аварийный режим уже неоднократно (и успешно! :-))использовался летчиками, как самолетов, так и вертолетов. Известен самый длительный спуск на авторотации французского вертолета Aerospatiale SA.315B Lama , который осуществил летчик Jean Boulet в 1972 году. При осуществлении рекордного полета он достиг высоты 12440 метров после чего двигатель вертолета аварийно остановился. Посадка была осуществлена безопасно и мягко.
Звучит это, конечно, впечатляюще… Но лучше, я вам скажу, чтобы необходимости осуществлять аварийные посадки не возникало. Хватит с нас и тренировок :-).
Читайте также: